
电机控制
概念扫盲
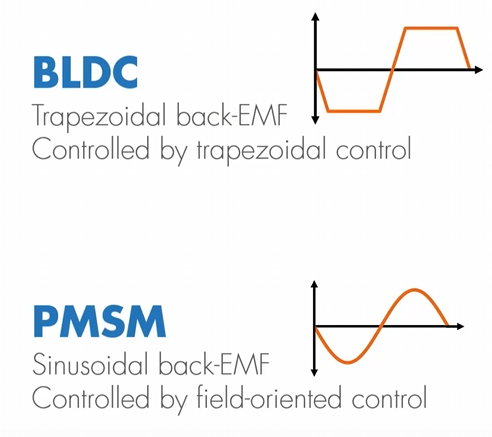
BLDC(Brushless DC Motor,无刷直流电机)、PMSM(Permanent Magnet Synchronous Motor,永磁同步电机)和FOC(Field-Oriented Control,磁场定向控制。BLDC和PMSM是两种不同的电机,它们的相同点都是无刷的,不同点在于反电动势电压的形状,BLDC通常用方波电流驱动,PMSM通常采用正弦波电流驱动,FOC作为一种控制方法,可用于驱动BLDC和PMSM。
| 特性 | BLDC | PMSM | FOC(控制策略) |
|---|---|---|---|
| 电机类型 | 无刷直流电机 | 永磁同步电机 | 控制策略(适用于BLDC和PMSM) |
| 驱动方式 | 方波驱动 | 正弦波驱动 | 磁场定向控制 |
| 控制精度 | 较低 | 较高 | 高 |
| 转矩波动 | 较大 | 较小 | 极小 |
| 应用场景 | 低成本、高速应用 | 高性能、高精度应用 | 高性能、高精度控制 |
BLDC
有刷VS无刷
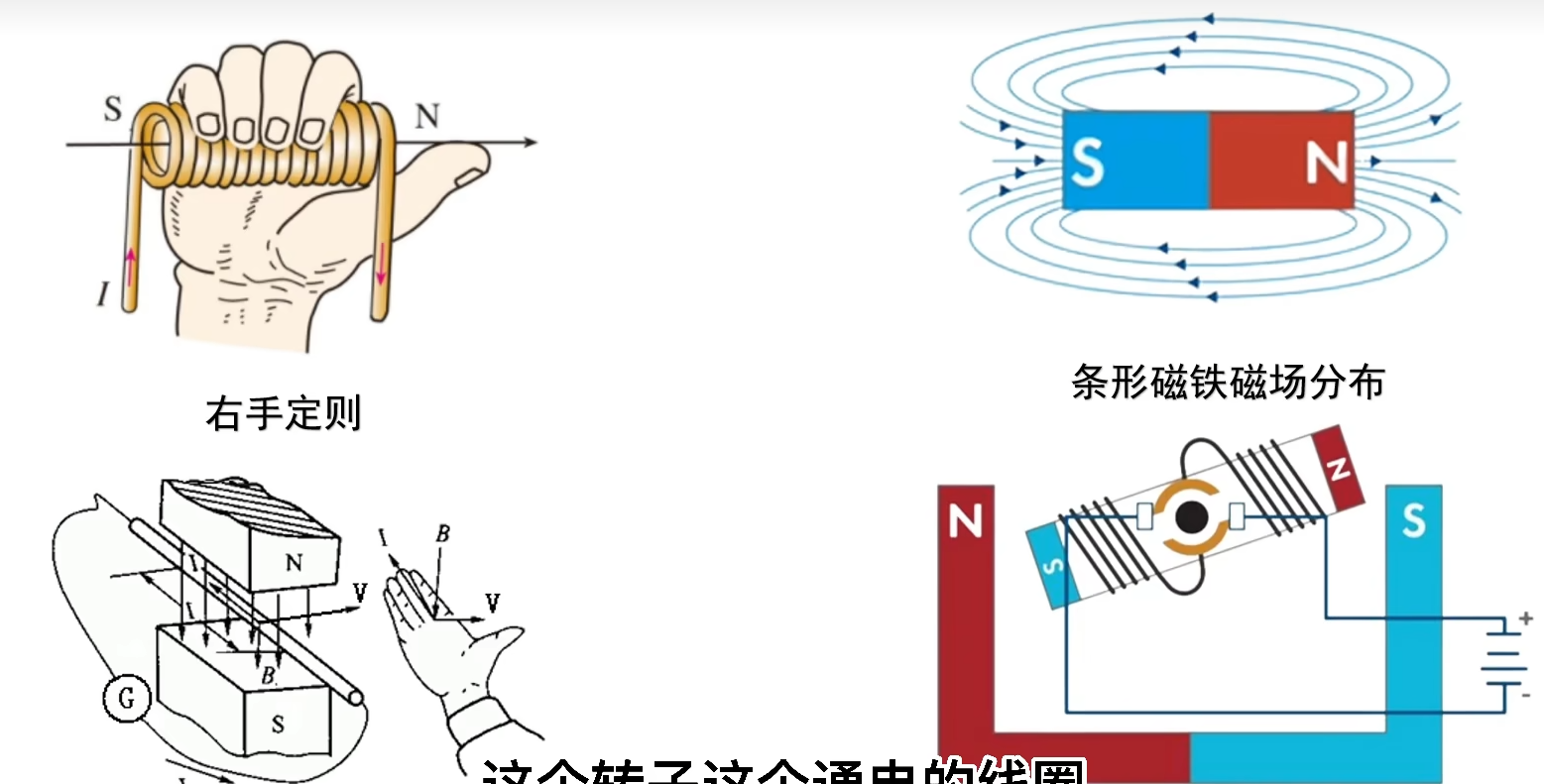
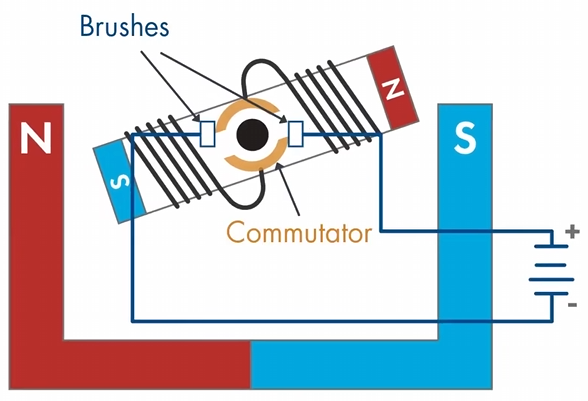
对于有刷电机的驱动方式,通过使直流电通过线圈绕组,得到一个具有磁极的电磁铁,磁极随后与永磁体的磁极相互作用,使转子旋转
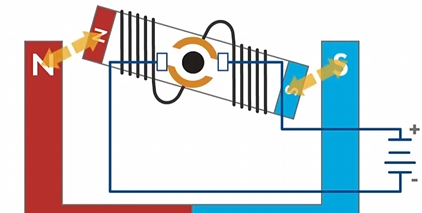
在转子每旋转半圈后
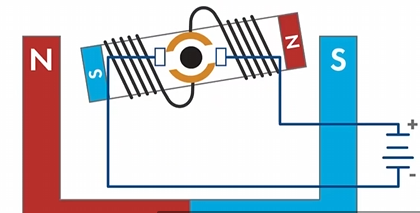
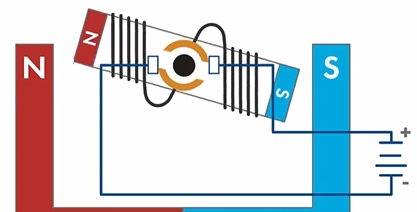
要使转子一直旋转,我们需要翻转电磁铁的磁极,通过切换线圈绕组中电流的极性实现,这种相位转换成为换向
在有刷电机中,换向发生在电机旋转时电刷与转子换向器接触的机械位置,由于这种接触,电刷会随着时间的推移而发生磨损,进而影响电机的性能
BLDC通过用电子换向代替机械换向克服有刷电机的缺点
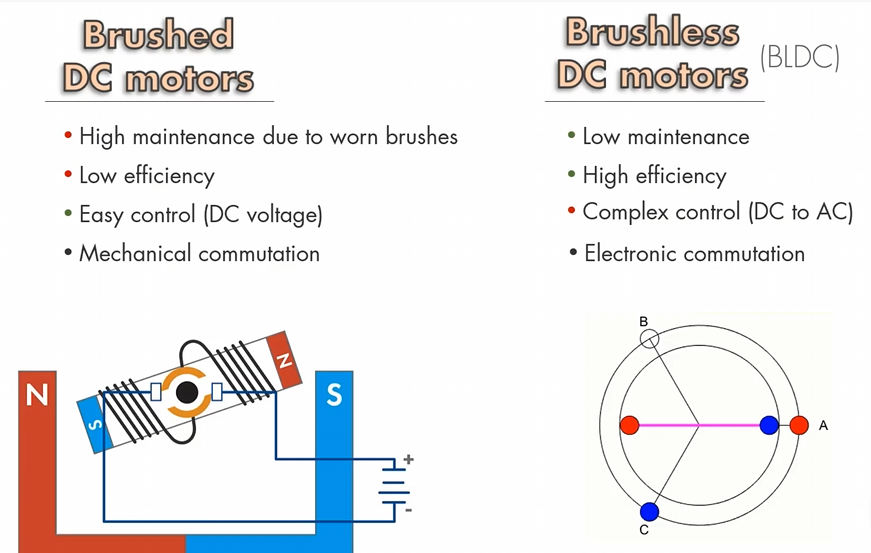
可以把BLDC看作是倒装的有刷电机,因为永磁体变为转子,线圈绕组变为了定子
对于BLDC和PMSM,其不同在于反电动势电压的形状,电机被旋转时起到发电机的作用,意味着在定子中感应到反电动势电压,该电压与电机的驱动电压相反,反电动势是电机的一个重要特征,通过观察其形状我们知道电机的类型,决定我们使用什么类型的控制算法来控制电机(可以将一相接到电压表,然后用手旋转转子,相当于发电机,电压表波形即该电机的反电动势)
内部工作原理
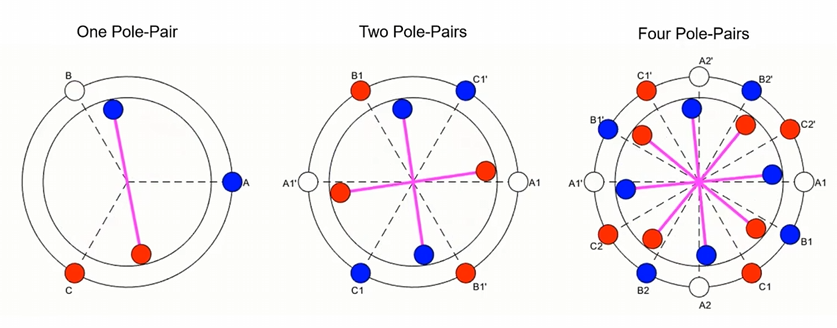
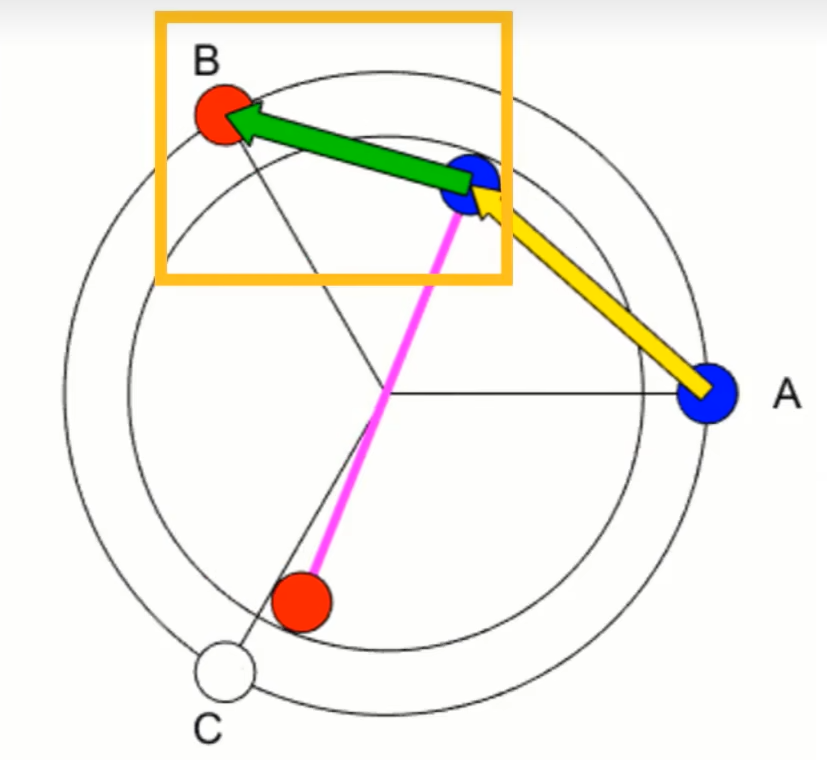
在A和C相之间施加电压,沿着虚线产生一个组合磁场
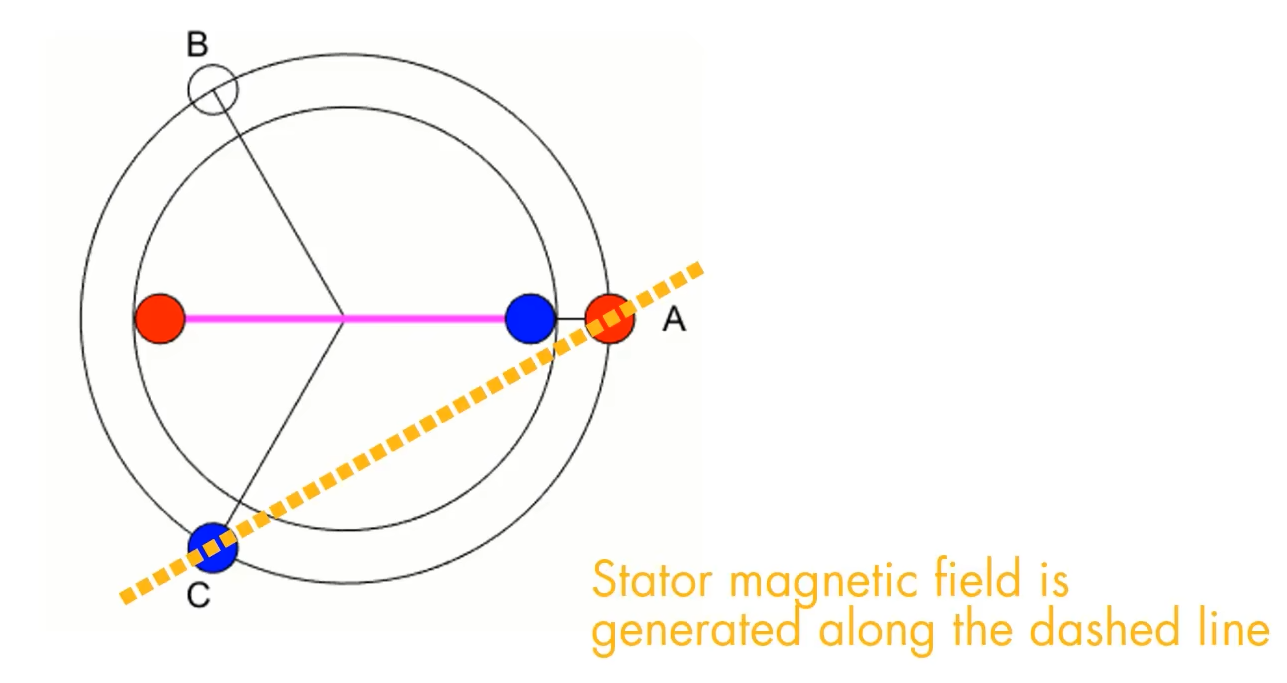
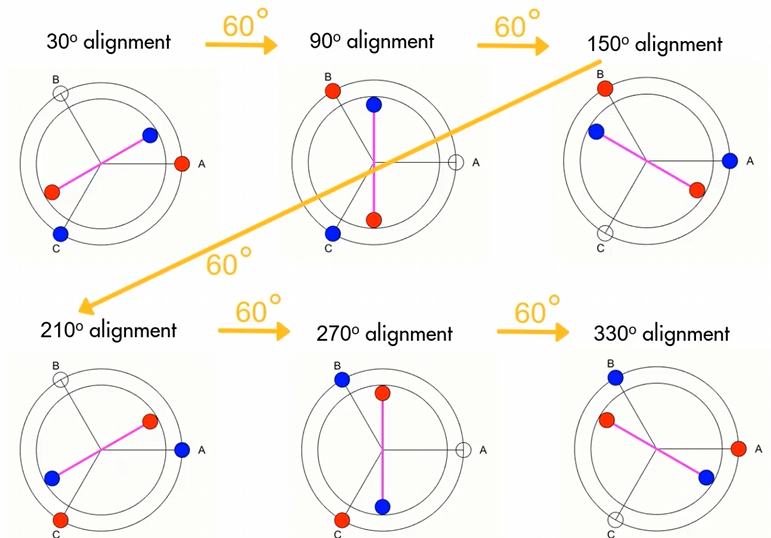
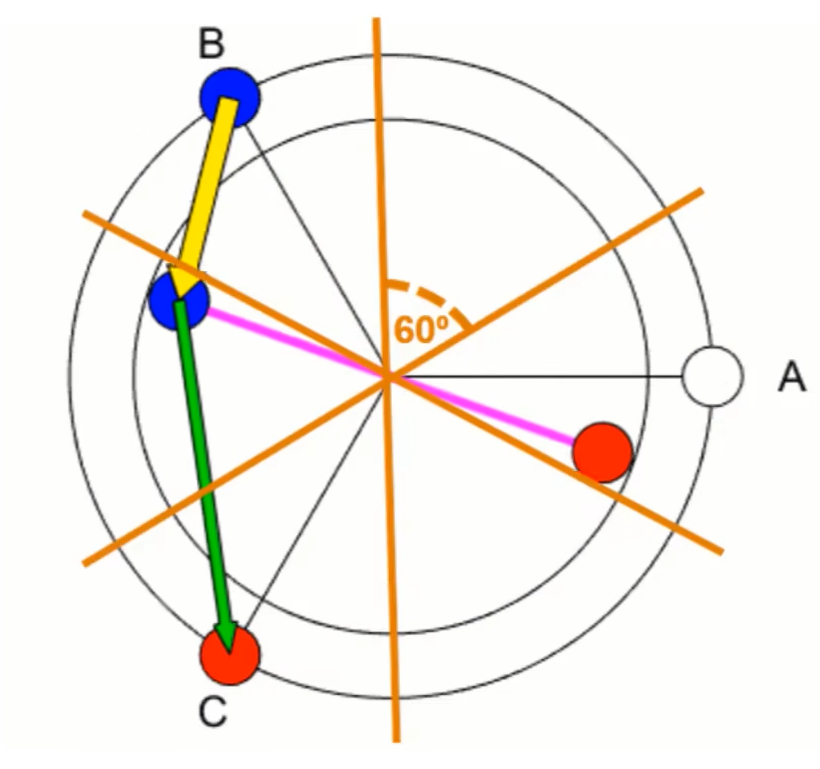
转子的角度是相对水平轴测量的,有六种不同的转子对齐方式,每种方式彼此间隔60°,如果我们能够每隔60°对相位进行正确的换向,就可以使电机旋转起来,这称为六步换向/梯形控制
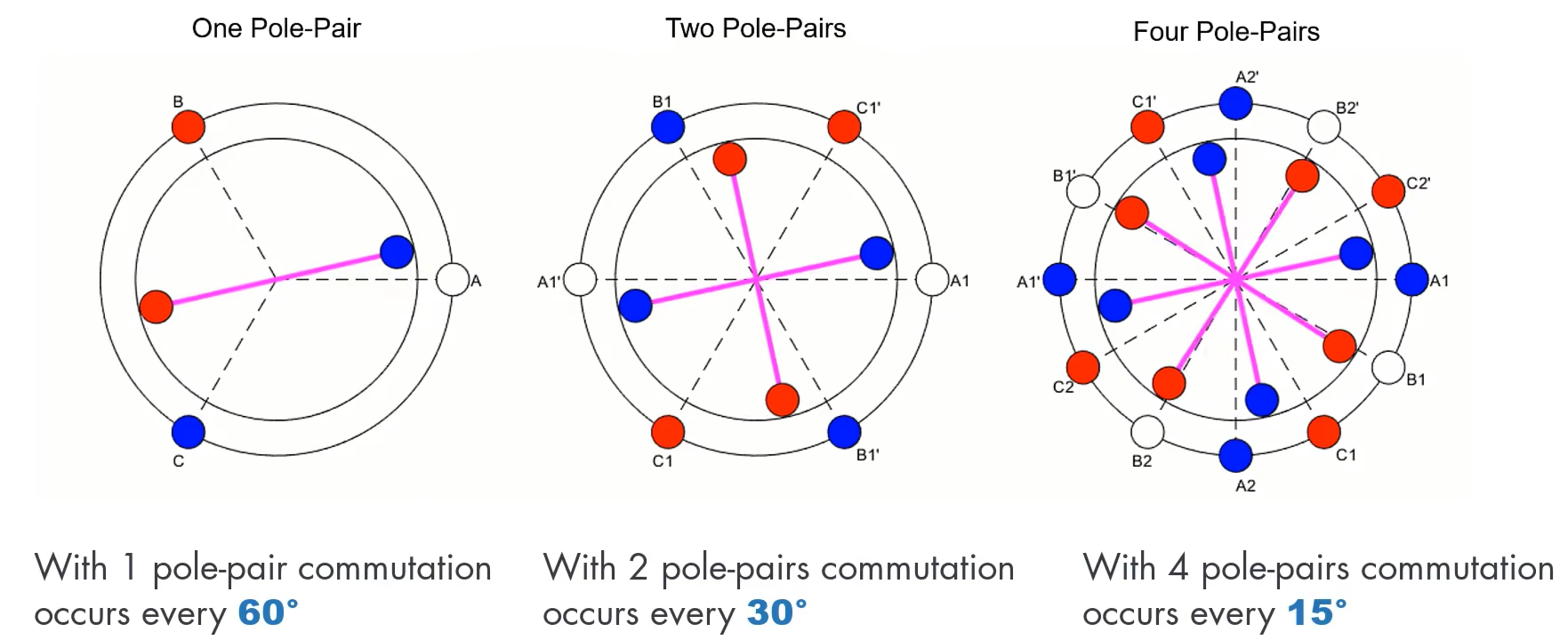
随着极对的增加换向会更频繁的发生,为了适时以正确的相位进行正确的换向,我们需要知道转子的位置,通常使用霍尔传感器来测量转子位置
完成60°旋转后,就会发生下一步换向
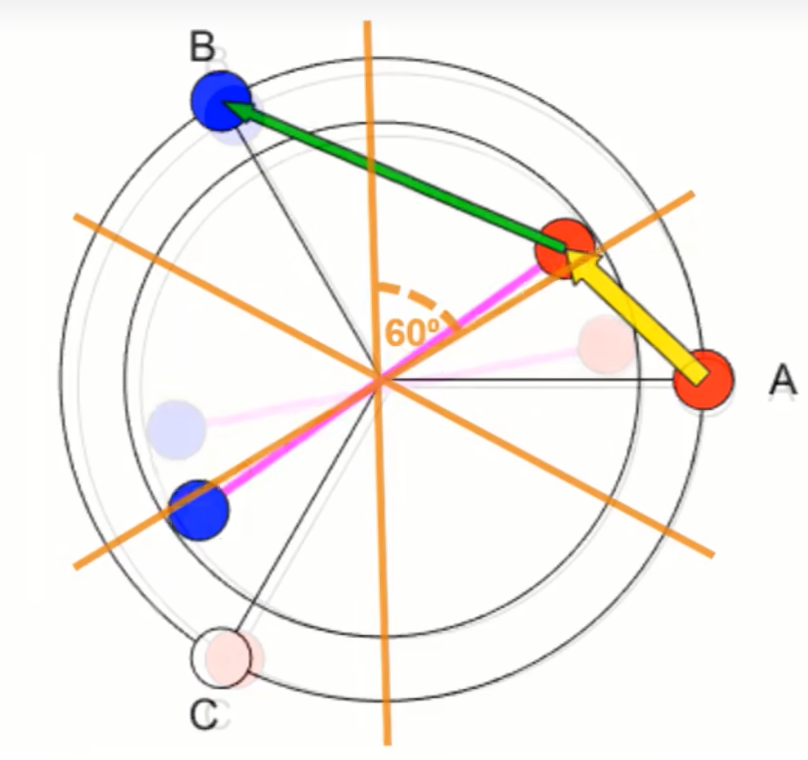
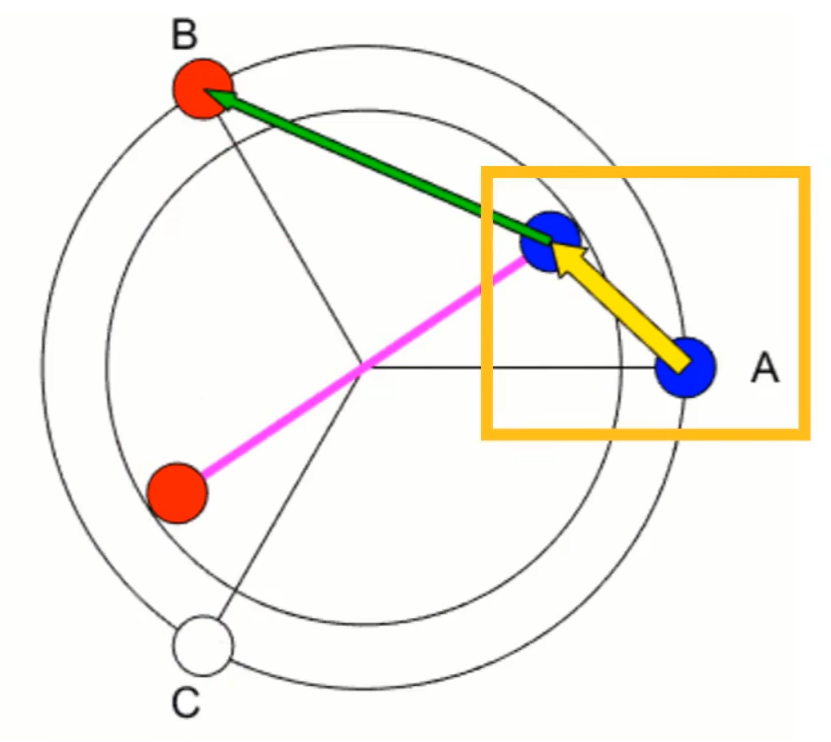
换向的发生方式是:转子永远不与定子磁场对齐,而是始终追逐它。 因为当转子和定子磁场完全对准时时,电机产生零扭矩,因此我们永远不会让它们对准,其次当磁场互成90°角时,会产生最大扭矩,在BLDC中,六步换向从未到达90°,且角度在一定范围内波动,造成这种情况的原因是梯形控制本身的特性,磁场定向控制等更先进的技术通常用于控制PMSM,可通过在定子磁场和转子磁场之间达到90°来产生更大的扭矩
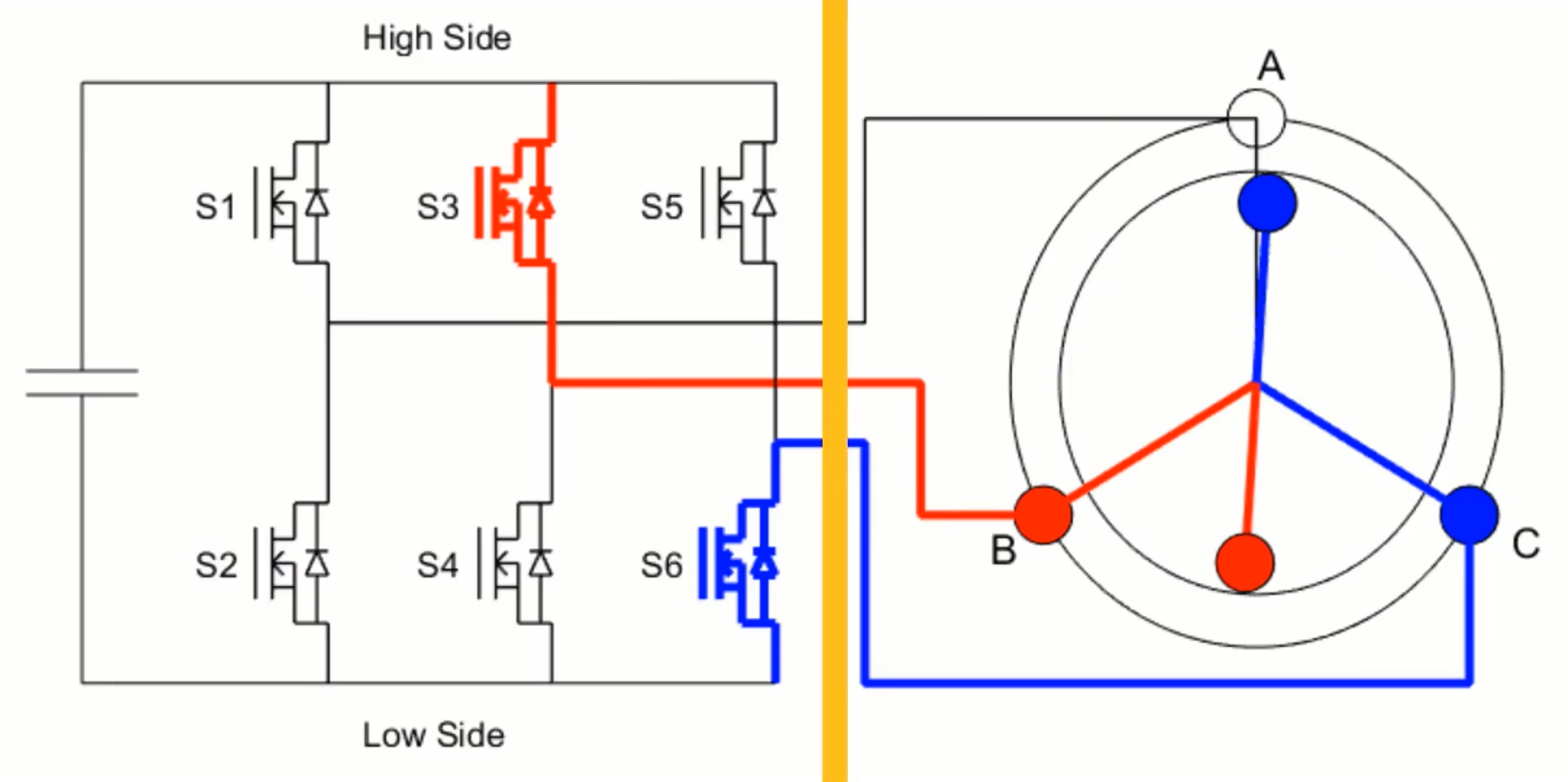
为了控制六步换向的相位,使用三相逆变器将直流电源转换为三相电流,三相逆变器会转换恒定电压,以使电机保持恒定速度,要以不同的速度控制电机,必须调节施加的电压,一种方法是PWM
 wechat
wechat alipay
alipay
