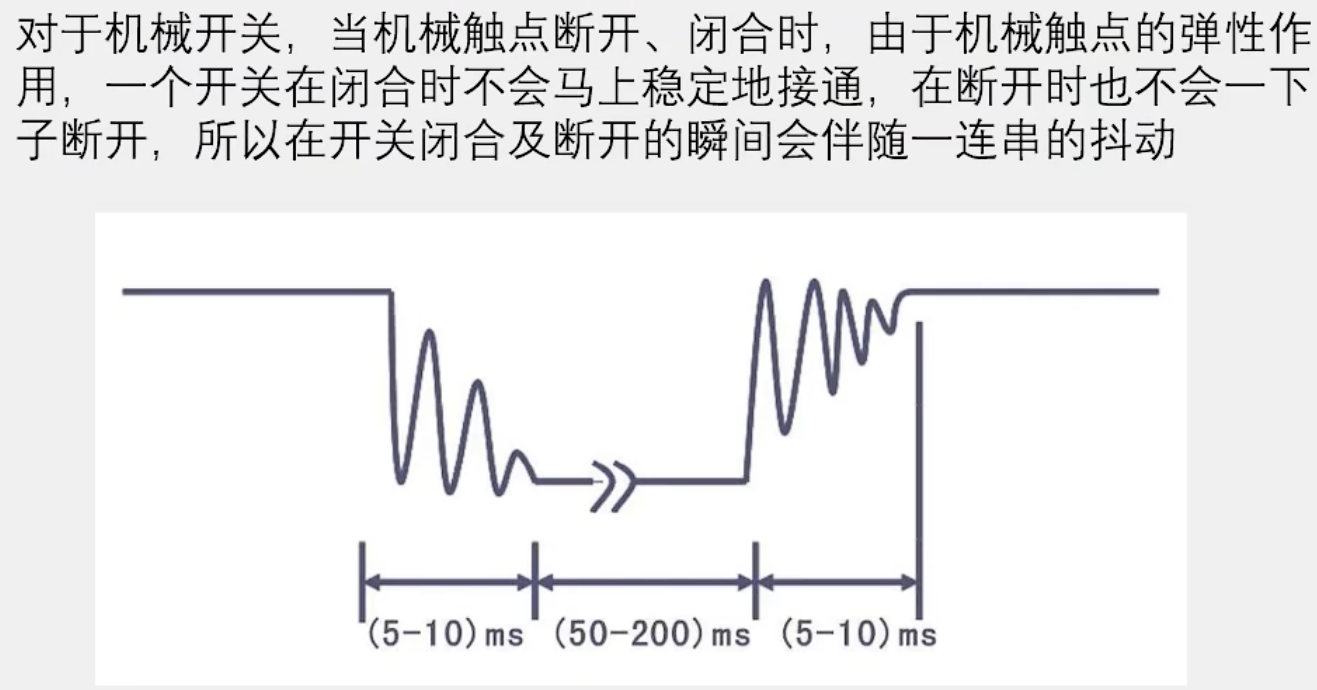
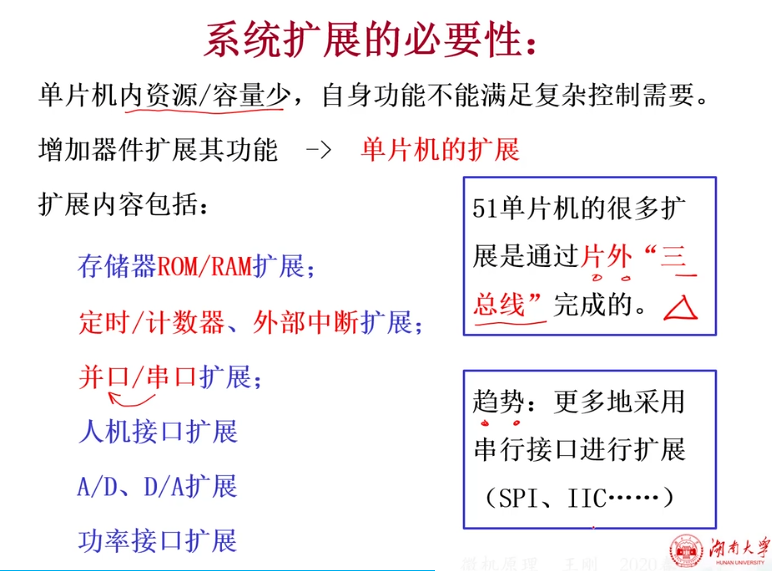
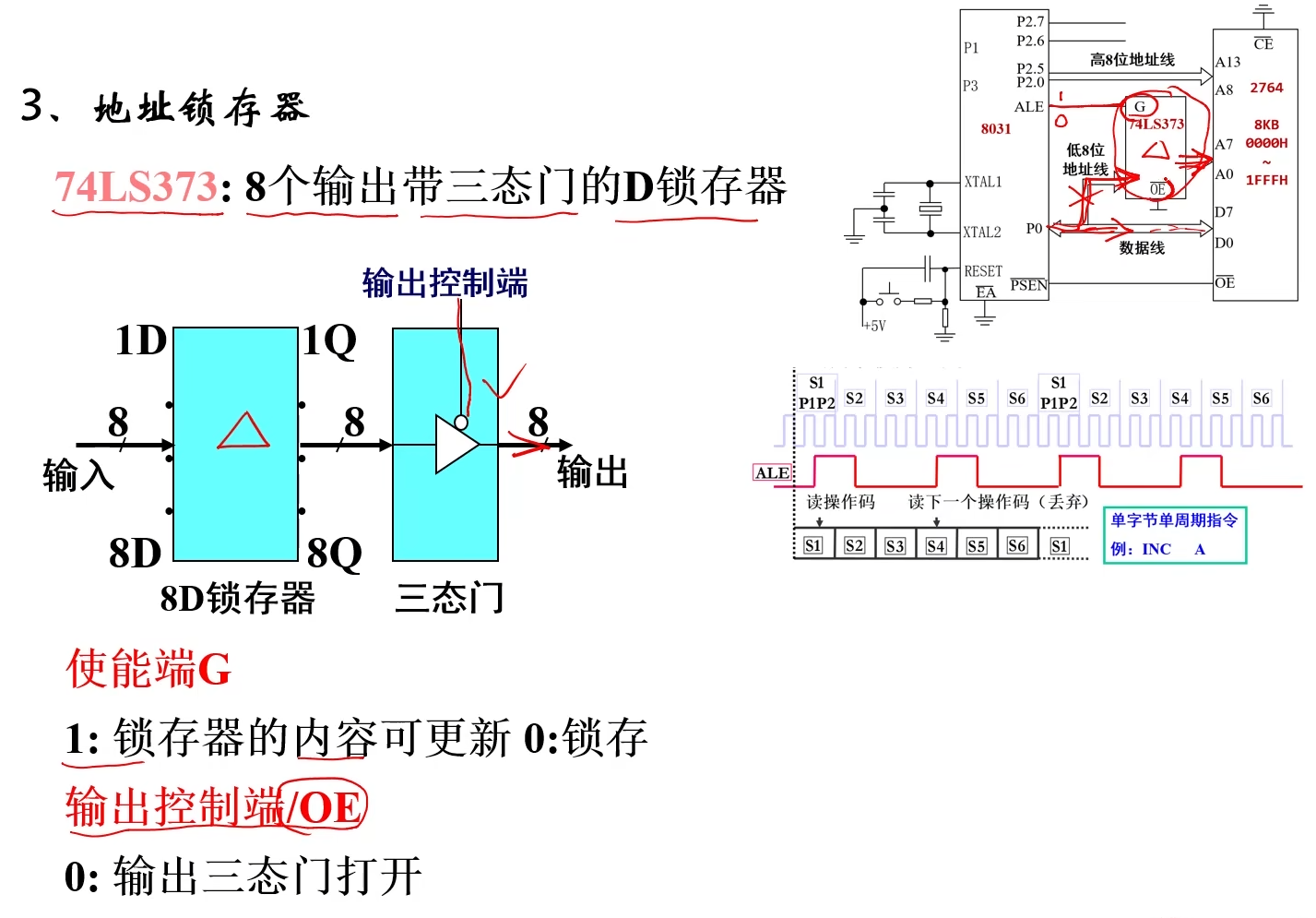
51单片机学习笔记
KEIL使用
KEIL安装包及相关资源,视频教程见b站江科大视频
https://pan.baidu.com/s/1Fao9VfrM67TIFeIsusnSIw?pwd=7rx1#list/path=%2F
烧录代码(生成hex文件)
魔术棒->output->勾选create hex file(每次新建工程都要配置)
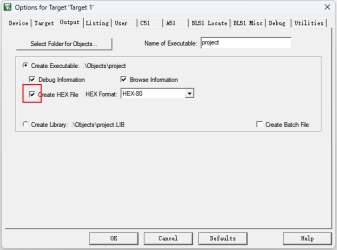
->编译,在object文件夹找到生成的hex文件(每次新建工程后要换成当前工程的文件夹,不然默认烧的是上个工程的hex文件)
->选择单片机型号为STC89C52RC 若选成STC89C52无法下载(用的普中的这个单片机丝印上写的有RC)
->单片机关机,点击下载程序,显示正在检测目标单片机后开机即可下载
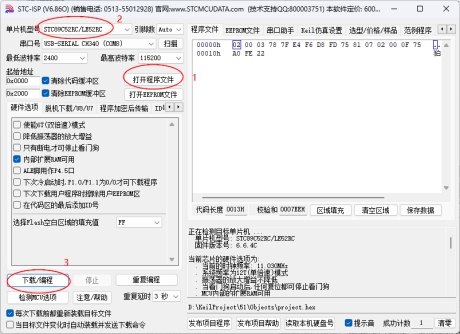
当勾选左下角“当目标文件变化……”,我们在keil中编译后STC-ISP软件会自动发送下载指令,我们只需要对单片机断电,再次开机即可。
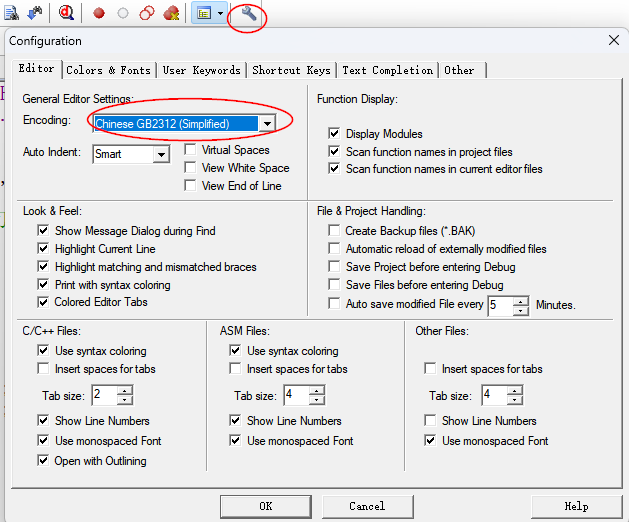
字体设置
我们在使用Keil的时候编译器默认是使用ANSI进行编码的,在ANSI中对于英文是使用一个字节来表示,但是对于中文,在GB2312的编码中是利用两个字节来表示的,所以如果我们按一次backspace键在ANSI下只会删掉一个字节,所以出现乱码,因为中文还有一个字节没有删掉。
按此设置后输入中文不会出现乱码
创建多文件
https://www.bilibili.com/video/BV1RB4y1i71i?spm_id_from=333.788.videopod.episodes&vd_source=a9d487fcf1a579639c6348eb5a9321db&p=157
keil主题配置
非常nice的一个主题配色
https://blog.csdn.net/wsstony579/article/details/53128206
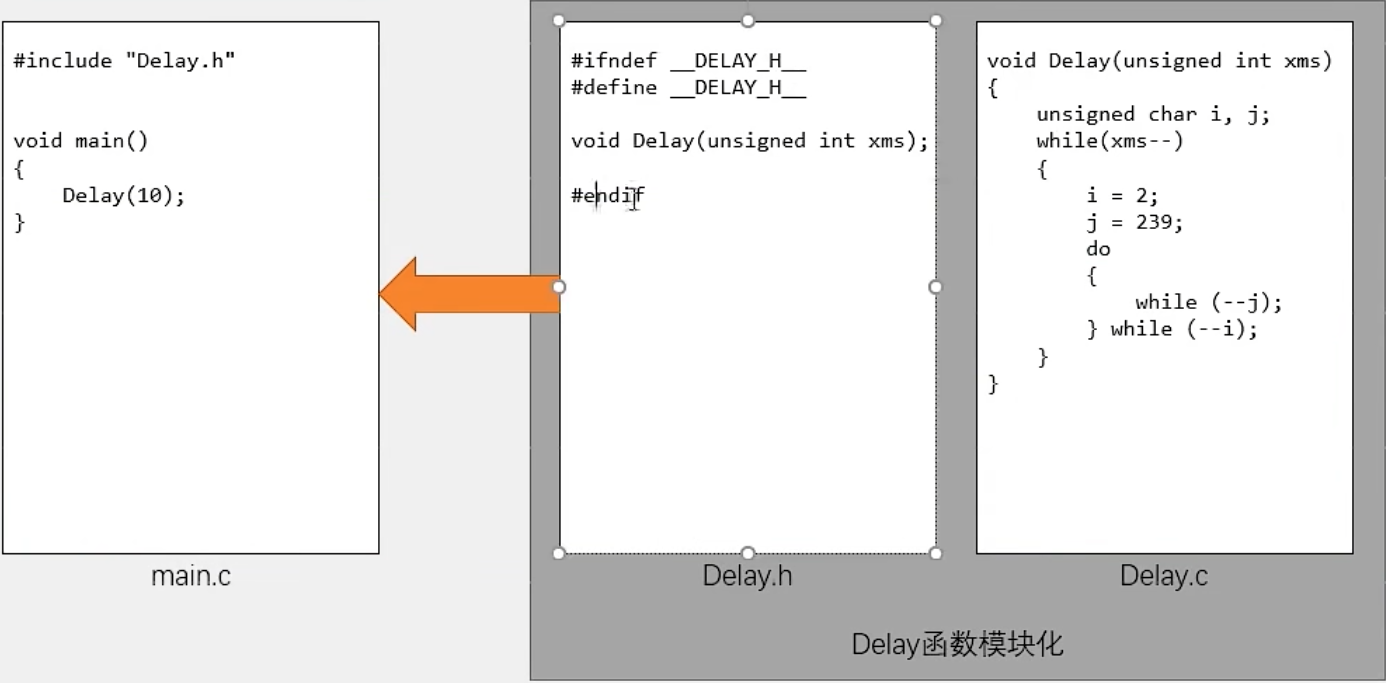
模块化编程
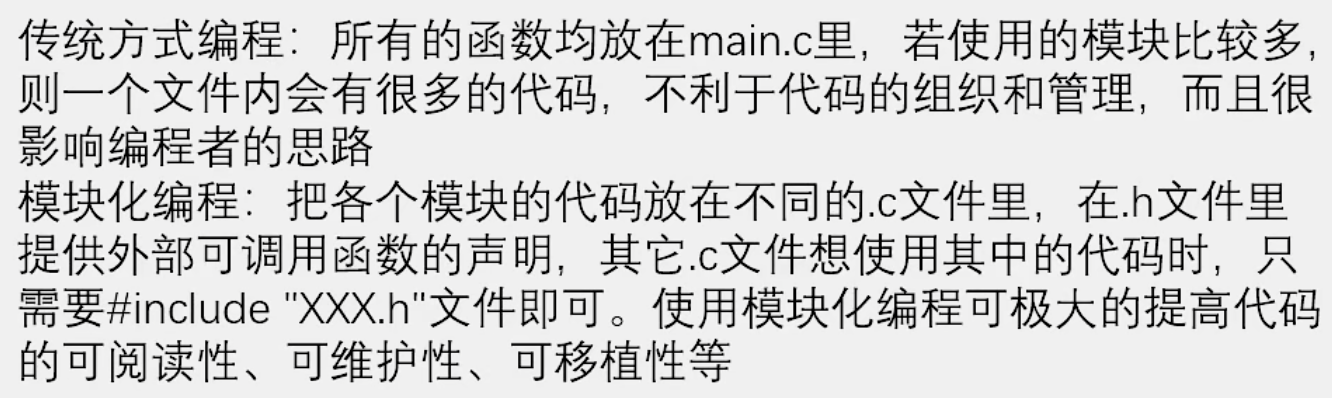
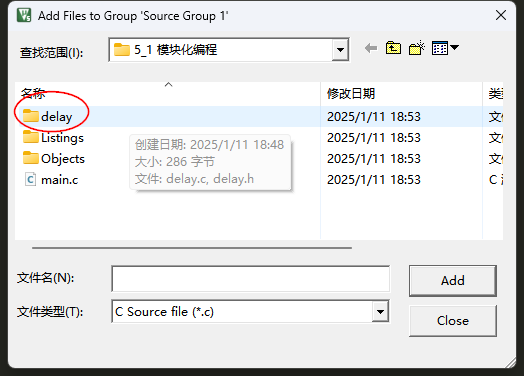
1.新建文件夹
2.在文件夹内新建.c .h文件

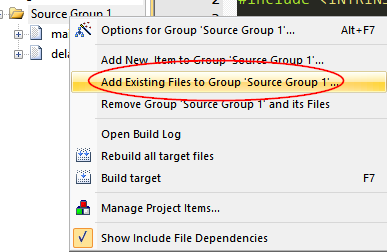
3.添加.c文件
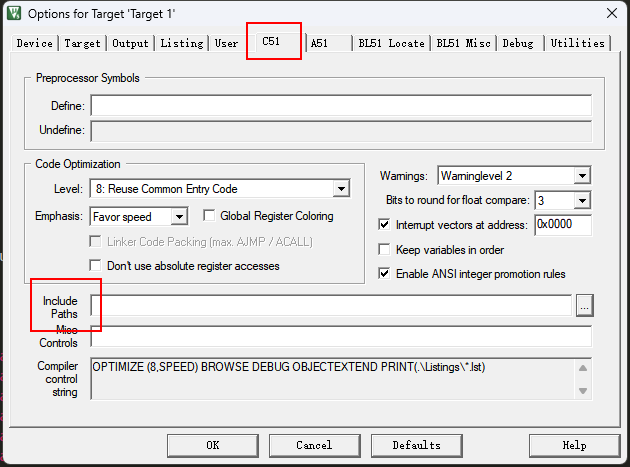
4.将.h文件路径包含进去,否则编译器找不到
魔术棒->c51->Include Paths 添加.h存放位置
5.在.c文件中包含对应.h,在.h里写如下代码:
1
2
3
4
5
6
| #ifndef __DELAY_H__
#define __DELAY_H__
void Delay_ms(unsigned int ms) ;
#endif
|
模板
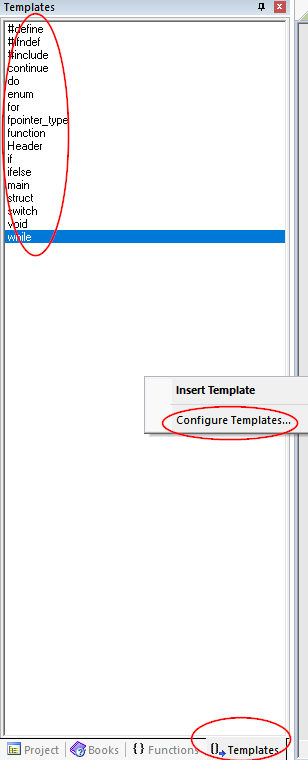
可以把一些固定的代码当作模板,后面需要用的时候直接双击即可,不用重复自己敲代码,提升效率。
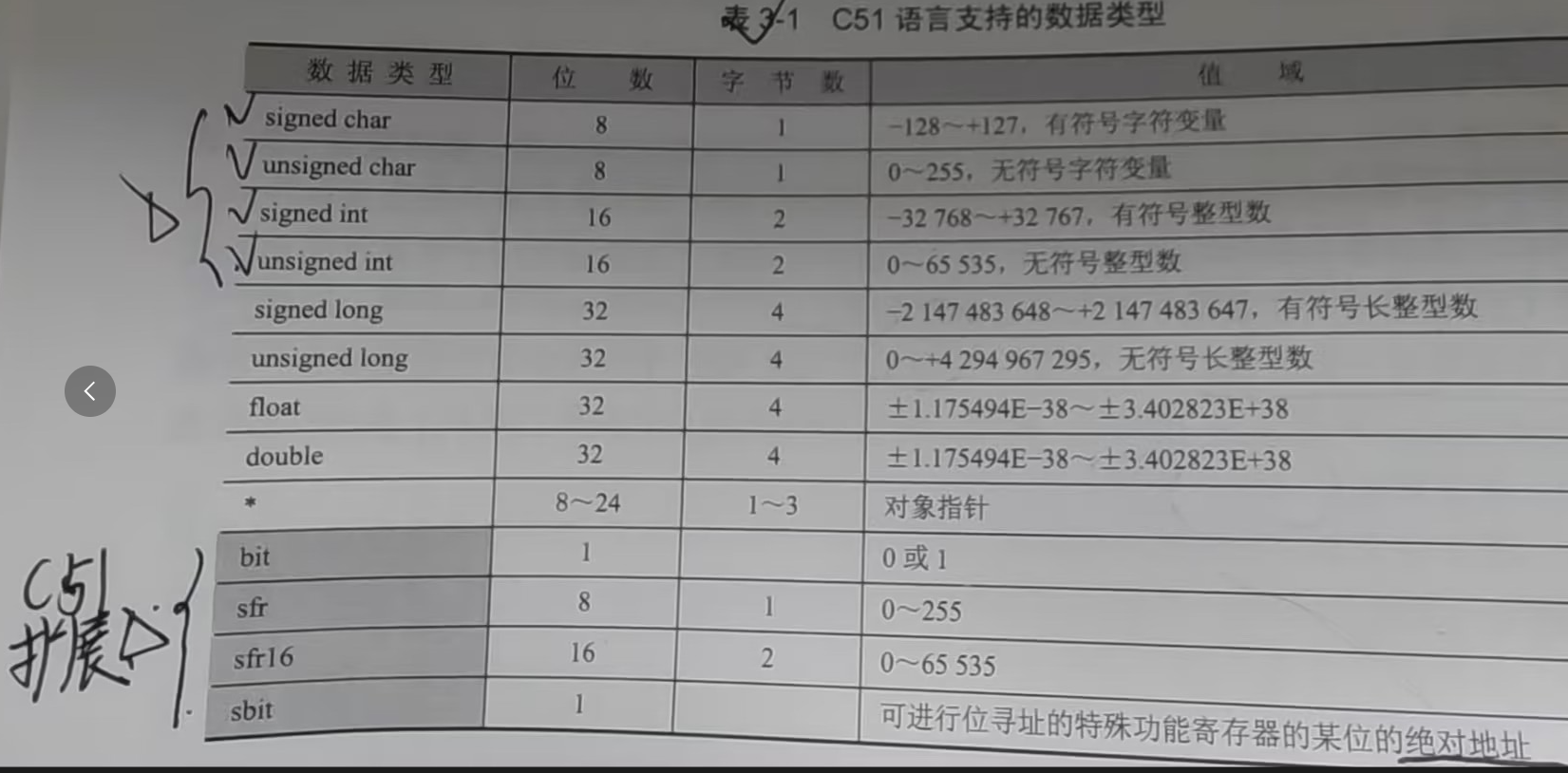
C51语言基础
数据类型
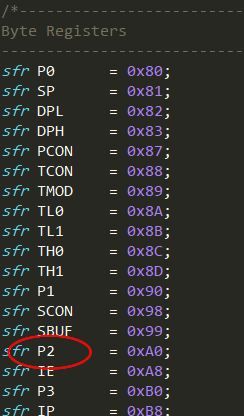
sfr(特殊功能寄存器)
8051单片机的特殊功能寄存器分布在内部数据存储区的地址单元80H~FFH中。sfr数据类型占用一个内存单元(一个字节)。利用它可以访问单片机内部的所有特殊功能寄存器。eg”sfr P1=0x90”定义了P1口在内部的寄存器中,在程序后续的语句中可以用”P1=0xff”语句,使P1口的所有引脚输出为高电平,来操作特殊功能寄存器
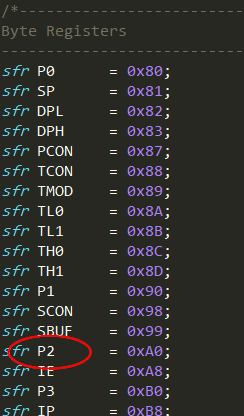
为什么P2 = 0xfe;能直接赋值
- 在C语言中,
P2被定义为SFR,编译器会将其视为一个8位寄存器。
- 当你对
P2赋值时,编译器会生成对应的机器指令,将值写入0xA0地址的寄存器。
- 硬件会根据写入的值,直接控制P2端口的状态。
赋值过程
当你执行P2 = 0xfe;时,实际发生了以下过程:
- 编译器处理:
- 编译器知道
P2对应地址0xA0,因此将P2 = 0xfe;翻译为:**将值0xfe写入地址0xA0**。
- 硬件执行:
- 单片机的硬件会将值
0xfe(二进制1111 1110)写入P2端口的输出寄存器。
- P2端口的每个引脚(P2.0到P2.7)会根据这个值设置电平状态:
- 因此,P2.0输出低电平,P2.1到P2.7输出高电平。
sbit(特殊功能位)
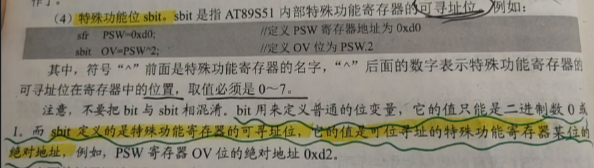
在8051系列单片机(如STC89C52)中:
- SFR的地址是8位的,范围是
0x80到0xFF。
- 每个SFR占用一个字节(8位),例如
P2的地址是0xA0。
- 位地址是对SFR的每一位单独寻址的地址。8051单片机支持位寻址,因此每个SFR的每一位都有一个独立的位地址
- SFR地址(如
0xA0)是对整个8位寄存器的操作地址。
- 位地址(如
0xA0到0xA7)是对SFR中某一位的操作地址。
eg:
字节操作(字节地址0xA0)
位操作(位地址0xA0)
1
2
| sbit P2_0 = P2^0;
P2_0 = 0;
|
- 操作的是位地址
0xA0,只影响P2.0这一位。
- **字节地址
0xA0**:用于操作整个P2端口的8位。
- **位地址
0xA0**:用于操作P2端口的第0位(P2.0)。
- 虽然它们的地址值相同,但它们的用途和操作对象完全不同。
位寻址
可位寻址的寄存器可以对它的每一位单独赋值,不可位寻址的寄存器只能整体赋值

数据运算

123÷10=12
123%10=3 %取余可以用来判断一个数是否可被另一个数整除。
0011 1100<<1 -> 0111 1000
0011 1100>>2 -> 0000 1111
0001 1000&0010 1010 -> 0000 1000
0001 1000|0010 1010 -> 0011 1010
0001 1000^0010 1010 -> 0011 0010 相同取0 不同取1
~0001 1000 -> 1110 0111
1
2
3
4
5
6
7
8
9
10
11
12
13
| void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFC;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
|
移位
在c语言中,尤其是单片机的C51中,移位运算操作很常见。实现移位操作的方法有两种:一是利用移位运算符,二是利用移位函数。
区别:
1.移位运算符,是系统内置的运算操作,编译编译不用包含相关头文件;而移位函数编译要包含intrins.h头文件。
2.<<和>>的移位规则数据从一端移动到另外一端,数据尾部移走后会补0,数据头部移到最前端后会溢出,溢出的数据就被抹掉了。
_crol_等函数是是循环移位,首位相接,数据前端移动到尾部后,会从尾部再次进入队列,数据不会溢出。运算符是线性队列,循环移位函数是环形队列。
1
2
3
4
| unsigned char _crol_ (
unsigned char c,
unsigned char b);
|
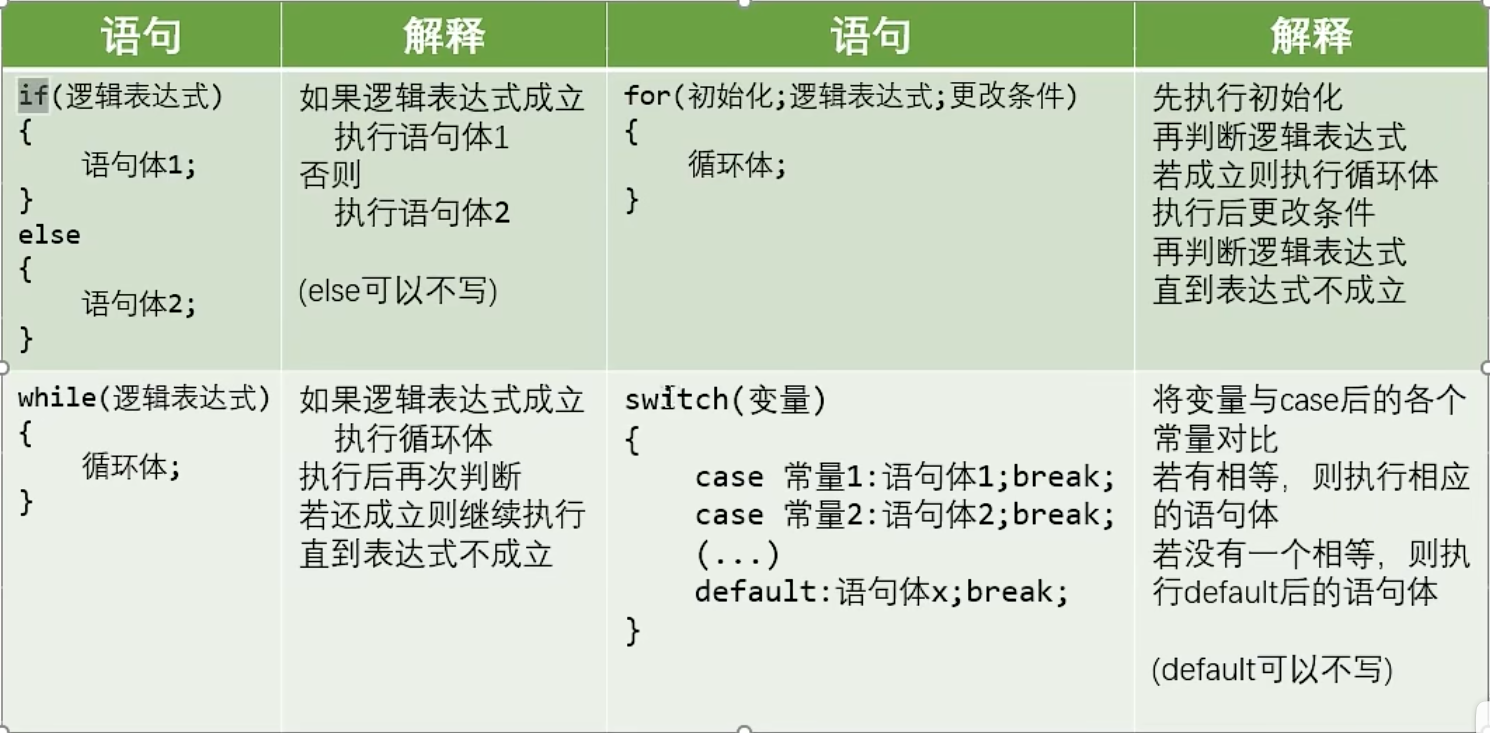
基本语句
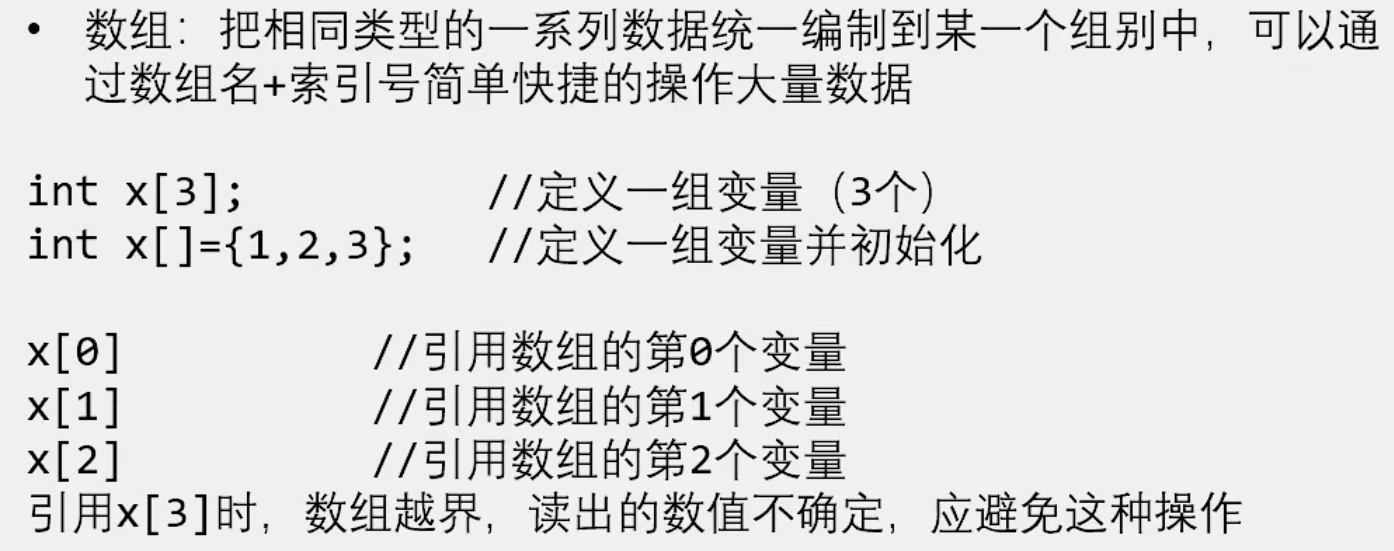
数组
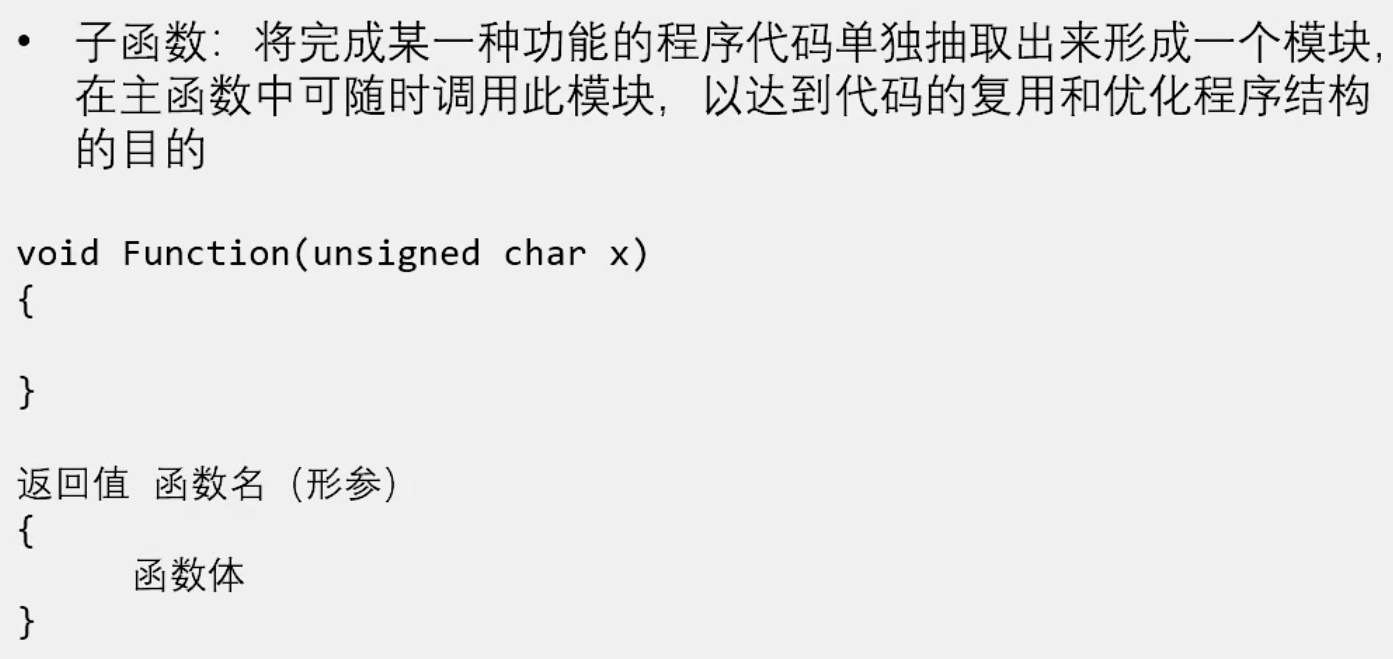
子函数
预编译

1
2
| #include <REG52.H>
#include "delay.h"
|
代码
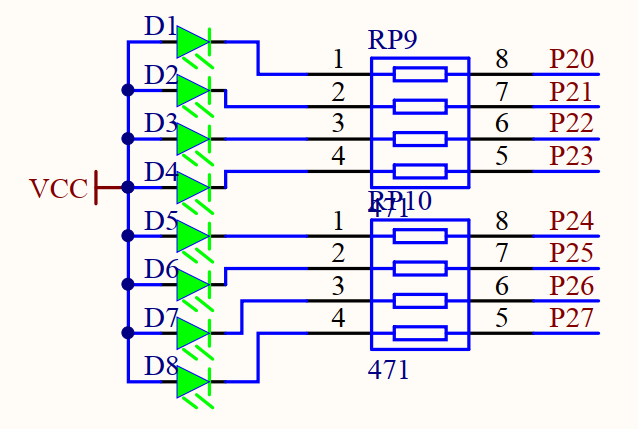
LED
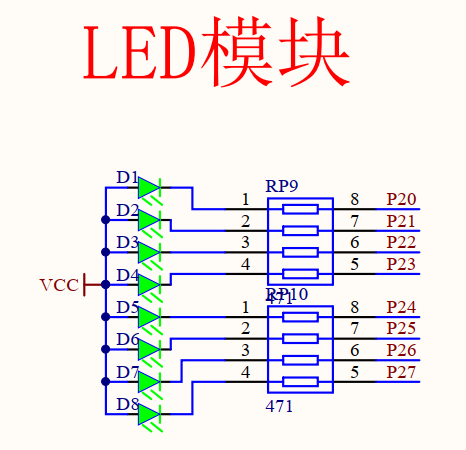
8个led对应P2寄存器的八个I/O口,置低电平则可使LED导通发光。
2-1 点亮第一个LED
在REGX52.H中已经定义了P2寄存器,可以直接对其赋值
1
2
3
4
5
6
7
8
9
| #include <REGX52.H>
void main()
{
P2=0xfe;
while(1)
{
}
}
|
P2各位在头文件已经被定义,故也可单独对P2的某一位进行赋值操作:
1
2
3
4
5
6
7
8
9
| #include <REGX52.H>
void main()
{
P2_0=0;
while(1)
{
}
}
|
2-2 LED闪烁
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
| #include <REGX52.H>
#include <INTRINS.H>
void Delay500ms()
{
unsigned char i, j, k;
_nop_();
i = 4;
j = 205;
k = 187;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
while(1)
{
P2=0xfe;
Delay500ms();
P2=0xff;
Delay500ms();
}
}
|
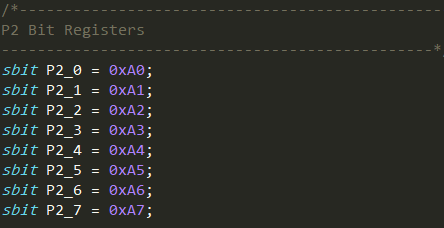
延时函数由STC-ISP软件生成
2-3 LED流水灯
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| #include <REGX52.H>
#include <INTRINS.H>
void Delay500ms()
{
unsigned char i, j, k;
_nop_();
i = 4;
j = 205;
k = 187;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
while(1)
{
P2=0xfe;
Delay500ms();
P2=0xfd;
Delay500ms();
P2=0xfb;
Delay500ms();
P2=0xf7;
Delay500ms();
P2=0xef;
Delay500ms();
P2=0xdf;
Delay500ms();
P2=0xbf;
Delay500ms();
P2=0x7f;
Delay500ms();
}
}
|
延迟函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| void Delay_ms(unsigned int ms)
{
unsigned char i, j;
while(ms)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
ms--;
}
}
|
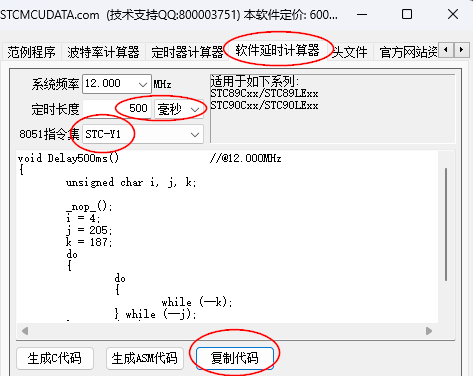
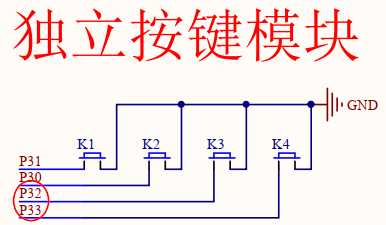
独立按键
单片机上电后默认为高电平,按下按键后,I/O口接地,变为低电平。检测I/O口高低电平状态即可知道按键是否被按下。
3-1独立按键控制LED亮灭
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
#include <REGX52.H>
void main()
{
while(1)
{
if(P3_1==0)
{
P2_0=0;
}
else
{
P2_0=1;
}
}
}
|
3-2独立按键控制LED状态
软件消抖
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
#include <REGX52.H>
#include <INTRINS.H>
void Delay_ms(unsigned int ms)
{
unsigned char i, j;
while(ms)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
ms--;
}
}
void main()
{
while(1)
{
if(P3_1==0)
{
Delay_ms(20);
while(P3_1==0);
Delay_ms(20);
P2_0=~P2_0;
}
}
}
|
3-2独立按键控制LED显示二进制
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
| #include <REGX52.H>
#include <INTRINS.H>
void Delay_ms(unsigned int ms)
{
unsigned char i, j;
while(ms)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
ms--;
}
}
void main()
{
unsigned char LEDNum=0;
while(1)
{
if(P3_1==0)
{
Delay_ms(20);
while(P3_1==0);
Delay_ms(20);
LEDNum++;
P2=~LEDNum;
}
}
}
|
3-3独立按键控制LED移位(有思维)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
|
#include <REGX52.H>
#include <INTRINS.H>
unsigned char LEDNum=0;
void Delay_ms(unsigned int ms)
{
unsigned char i, j;
while(ms)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
ms--;
}
}
void main()
{
P2=~0x01;
while(1)
{
if(P3_0==0)
{
Delay_ms(20);
while(P3_0==0);
Delay_ms(20);
LEDNum++;
if(LEDNum>=8)
LEDNum=0;
P2=~(0x01<<LEDNum);
}
if(P3_1==0)
{
Delay_ms(20);
while(P3_1==0);
Delay_ms(20);
if(LEDNum==0)
LEDNum=7;
else
LEDNum--;
P2=~(0x01<<LEDNum);
}
}
}
|
数码管
数码管是由多个发光二极管封装在一起组成的“8”字型的器件。
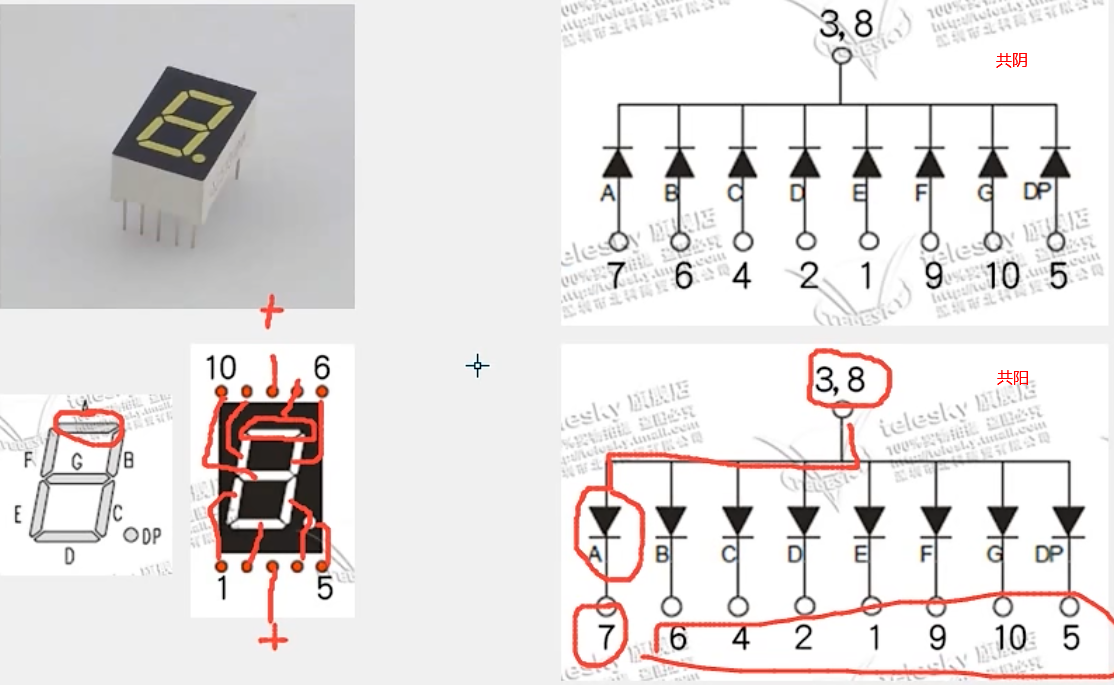
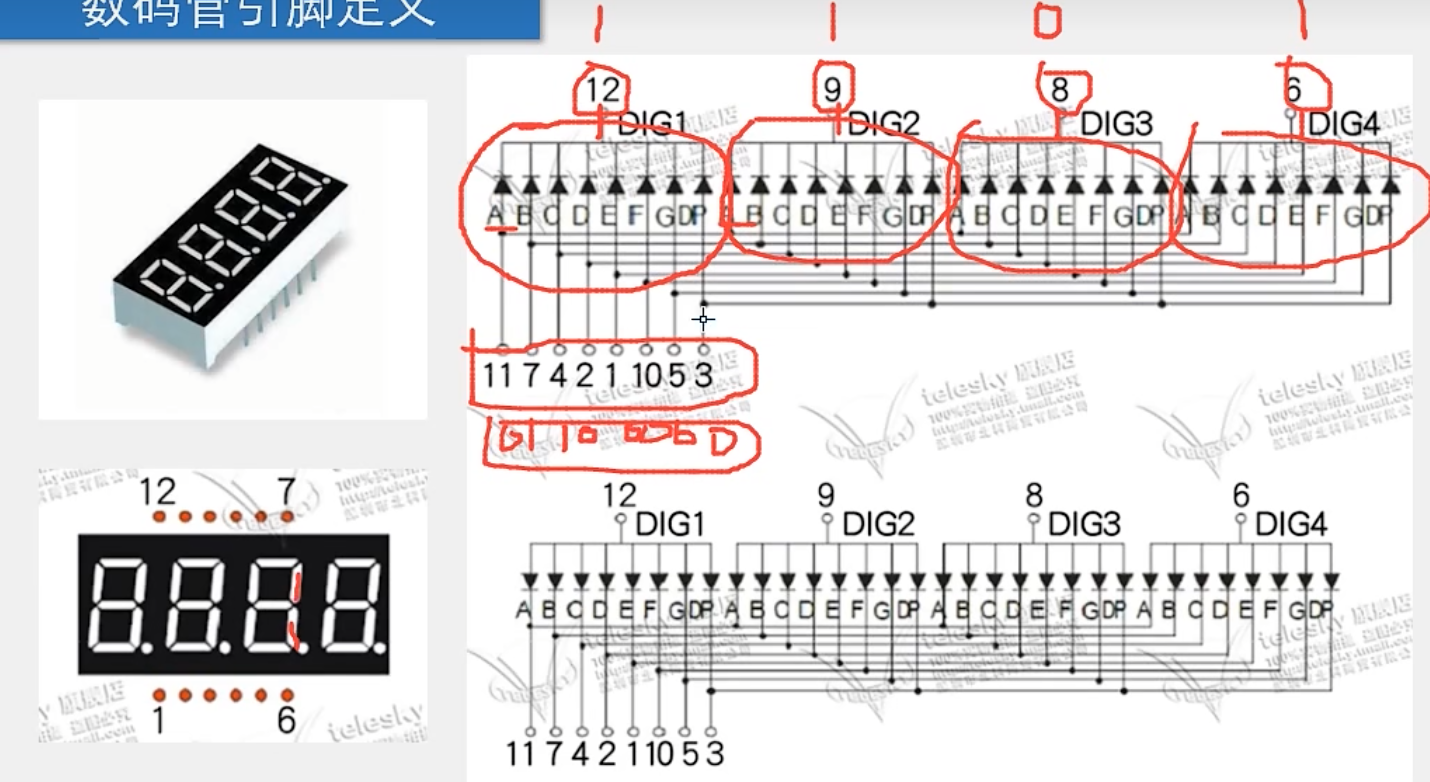
对于四位一体数码管,eg:共阴,让第三个数码管亮其余灭,则位选1101,第三个数码管显示数字1,让7,4端口高电平,即给整个数码管01100000,若位选时为0000,则四个数码管都显示1,共阴极这种设计是四个数码管的A,B,C….分别在同一条线上,可以节省单片机I/O资源
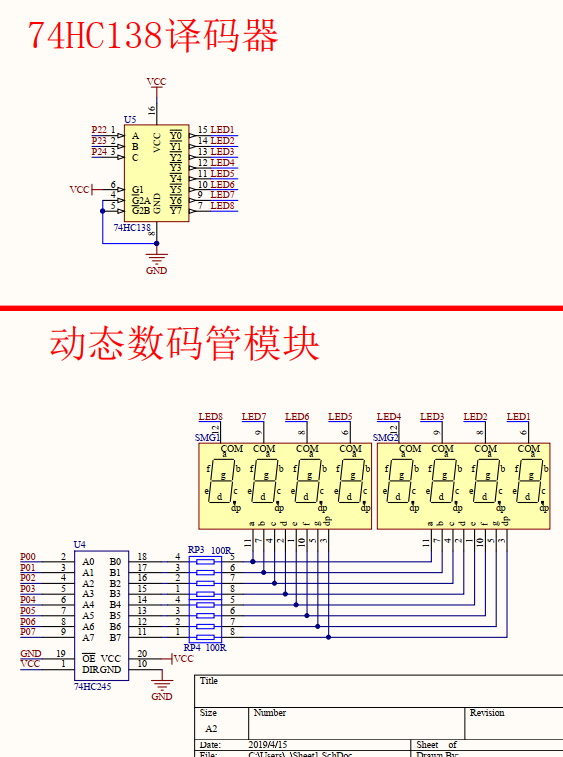
该单片机数码管为公阴极。74HC245是一个信号缓冲器,由于单片机引脚的驱动能力较弱,通过该缓冲器后,输出的电流更大(利用它自己接的VCC输出)
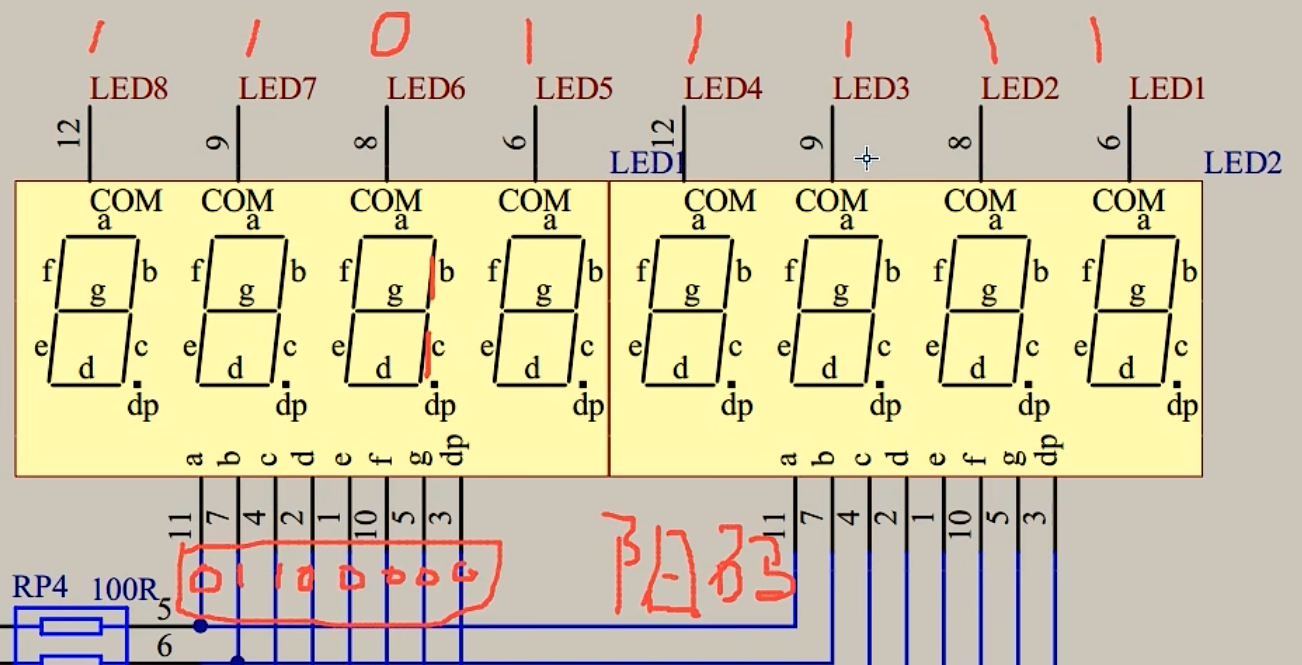
LED1-8接到138译码器的输出端
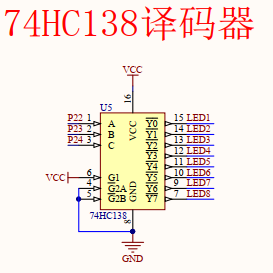
138译码器输入端为A,B,C(P22,P23,P24),输出端为Y0-Y7(LED1-8),由三个输入端控制8个输出端。 G1,G2A,G2B为使能端(此电路设计时已经接好,单片机上电就可以用该译码器)。
给CBA(C为高位)写二进制,转换成的十进制即要让输出端哪一位亮。eg:给CBA 101,101转换成十进制即5,即让Y5为0
总结:驱动方式:用138译码器选中哪个数码管亮,再用245缓冲器给段码数据使数码管显示对应数字
4-1静态数码管显示
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| #include <REGX52.H>
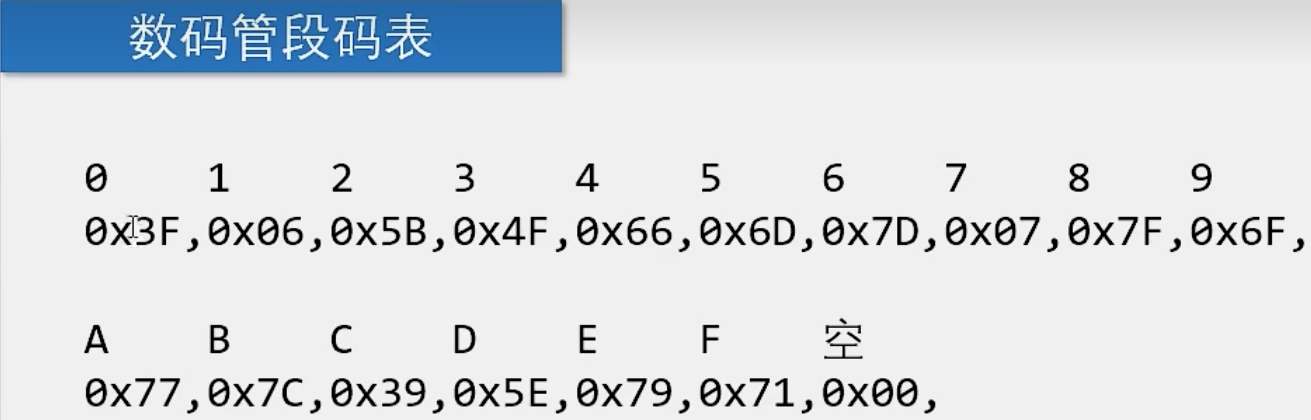
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0X6D,0X7D,0X07,0x7F,0X6F};
void NixieTube(unsigned char Location,Number)
{
switch(Location)
{
case 1:P2_4=0;P2_3=0;P2_2=0;break;
case 2:P2_4=0;P2_3=0;P2_2=1;break;
case 3:P2_4=0;P2_3=1;P2_2=0;break;
case 4:P2_4=0;P2_3=1;P2_2=1;break;
case 5:P2_4=1;P2_3=0;P2_2=0;break;
case 6:P2_4=1;P2_3=0;P2_2=1;break;
case 7:P2_4=1;P2_3=1;P2_2=0;break;
case 8:P2_4=1;P2_3=1;P2_2=1;break;
}
P0=NixieTable[Number];
}
void main()
{
NixieTube(7,3);
while(1)
{
}
}
|
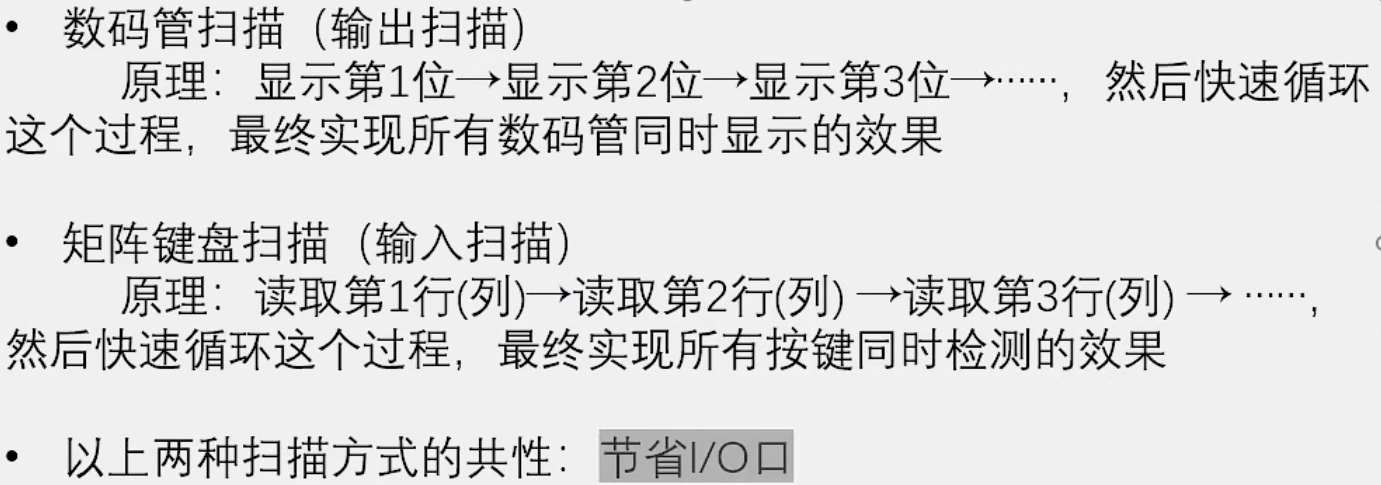
4-2动态数码管显示
利用人眼视觉暂留和数码管显示的余晖(先让第一个数码管显示1,第二关显示2,第三个显示3,不断地扫描,由于视觉暂留可以看到123)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
| #include <REGX52.H>
#include <INTRINS.H>
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0X6D,0X7D,0X07,0x7F,0X6F};
void Delay_ms(unsigned int ms)
{
unsigned char i, j;
while(ms)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
ms--;
}
}
void NixieTube(unsigned char Location,Number)
{
switch(Location)
{
case 1:P2_4=0;P2_3=0;P2_2=0;break;
case 2:P2_4=0;P2_3=0;P2_2=1;break;
case 3:P2_4=0;P2_3=1;P2_2=0;break;
case 4:P2_4=0;P2_3=1;P2_2=1;break;
case 5:P2_4=1;P2_3=0;P2_2=0;break;
case 6:P2_4=1;P2_3=0;P2_2=1;break;
case 7:P2_4=1;P2_3=1;P2_2=0;break;
case 8:P2_4=1;P2_3=1;P2_2=1;break;
}
P0=NixieTable[Number];
}
void main()
{
while(1)
{
NixieTube(1,5);
Delay_ms(1);
NixieTube(2,5);
Delay_ms(1);
NixieTube(3,3);
Delay_ms(1);
}
}
|
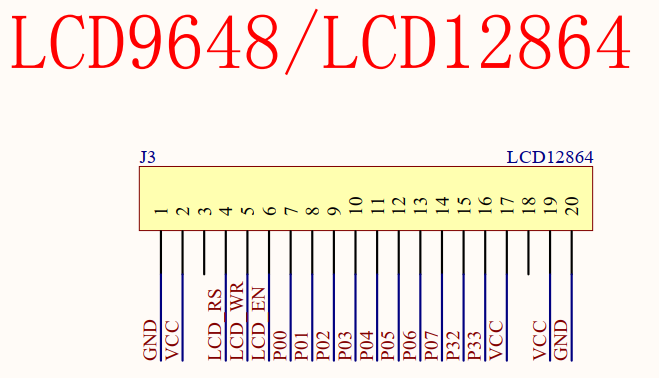
LCD1602显示屏
普中、51单片机LCD引脚与数码管和D3,D4,D5冲突,与其它引脚不冲突
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
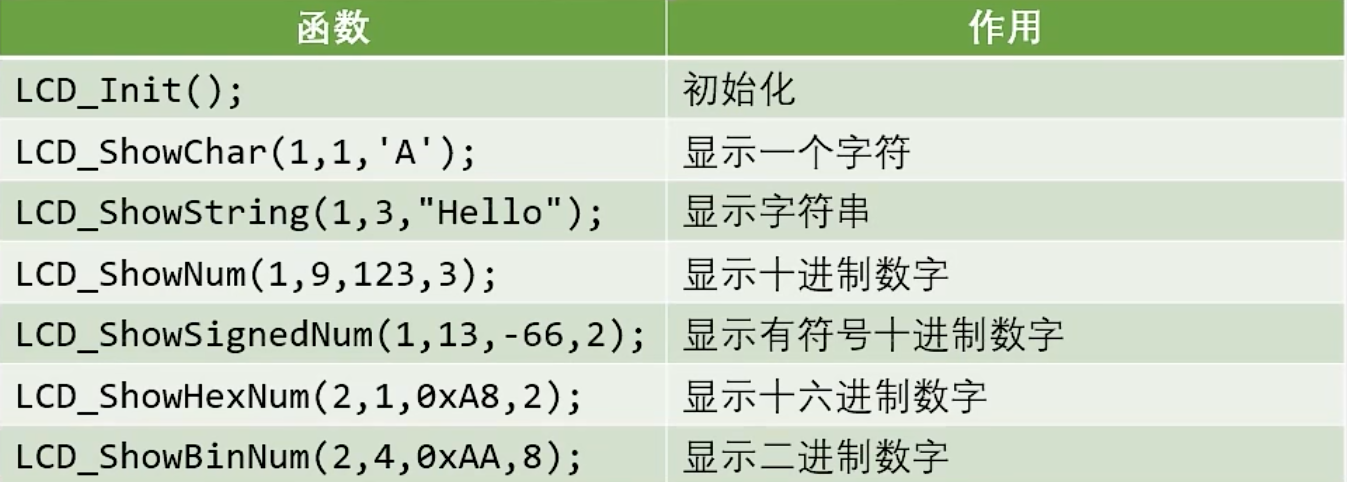
| void LCD_Init();
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
LCD_Init();
LCD_ShowChar(1,1,'A');
LCD_ShowString(1,3,"Hello word");
LCD_ShowNum(1,9,123,3);
LCD_ShowSignedNum(1,13,-66,2);
LCD_ShowHexNum(2,1,0xA8,2);
LCD_ShowBinNum(2,4,0xAA,8);
|
5-1 LCD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| #include <REGX52.H>
#include "delay.h"
#include "LCD1602.h"
int result=0;
void main()
{
LCD_Init();
LCD_ShowBinNum(2,4,0xAA,8);
while(1)
{
result++;
Delay_ms(1000);
LCD_ShowNum(1,1,result,3);
}
}
|
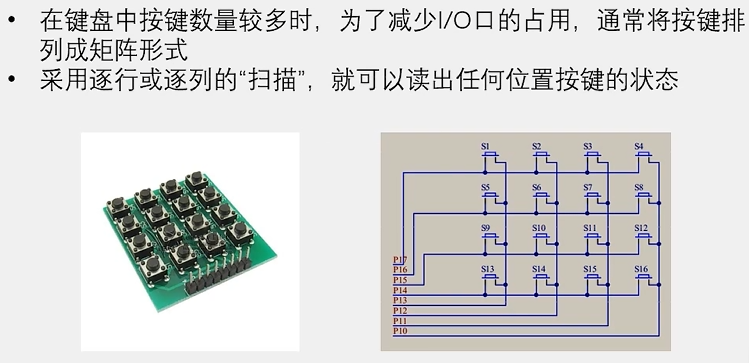
矩阵键盘
按键以矩阵的形式连接在I/O上。
检测方法
1.行列式扫描法(将矩阵按键拆分为独立按键) 2.线翻转法
行列式扫描法一行一行扫描,检测的次数不定,线翻转法只用检测两次,一次定行一次定列。
行列式扫描法(编程最简单最无脑,但相比线翻转法效率低)
原理:P17,P16,P15,P14为矩阵的4行,P13,P12,P11,P10为矩阵的4列,给行赋1011,则是单独看第二行,此时它们一端接地,只用检测P13,P12,P11,P10的电平状态即可知道该行有没有被按下的……以此类推,可以逐行/列扫描,由于此开发板引脚冲突,蜂鸣器会一直响,所以在此用逐列扫描。
普通按键是直接给它一端接地,矩阵键盘两端连的是两个I/O,行列式扫描法是通过令一个I/O为低电平达到和普通键盘一样的效果。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
| unsigned char MatrixKey()
{
unsigned char KeyNumber=0;
P1=0xFF;
P1_3=0;
if(P1_7==0){Delay_ms(20);while(P1_7==0);Delay_ms(20);KeyNumber=1;}
if(P1_6==0){Delay_ms(20);while(P1_6==0);Delay_ms(20);KeyNumber=5;}
if(P1_5==0){Delay_ms(20);while(P1_5==0);Delay_ms(20);KeyNumber=9;}
if(P1_4==0){Delay_ms(20);while(P1_4==0);Delay_ms(20);KeyNumber=13;}
P1=0xFF;
P1_2=0;
if(P1_7==0){Delay_ms(20);while(P1_7==0);Delay_ms(20);KeyNumber=2;}
if(P1_6==0){Delay_ms(20);while(P1_6==0);Delay_ms(20);KeyNumber=6;}
if(P1_5==0){Delay_ms(20);while(P1_5==0);Delay_ms(20);KeyNumber=10;}
if(P1_4==0){Delay_ms(20);while(P1_4==0);Delay_ms(20);KeyNumber=14;}
P1=0xFF;
P1_1=0;
if(P1_7==0){Delay_ms(20);while(P1_7==0);Delay_ms(20);KeyNumber=3;}
if(P1_6==0){Delay_ms(20);while(P1_6==0);Delay_ms(20);KeyNumber=7;}
if(P1_5==0){Delay_ms(20);while(P1_5==0);Delay_ms(20);KeyNumber=11;}
if(P1_4==0){Delay_ms(20);while(P1_4==0);Delay_ms(20);KeyNumber=15;}
P1=0xFF;
P1_0=0;
if(P1_7==0){Delay_ms(20);while(P1_7==0);Delay_ms(20);KeyNumber=4;}
if(P1_6==0){Delay_ms(20);while(P1_6==0);Delay_ms(20);KeyNumber=8;}
if(P1_5==0){Delay_ms(20);while(P1_5==0);Delay_ms(20);KeyNumber=12;}
if(P1_4==0){Delay_ms(20);while(P1_4==0);Delay_ms(20);KeyNumber=16;}
return KeyNumber;
}
|
线翻转法
先让四行为0,检测哪一列被按下(该列上任何一个按键被按下都会导致该列代表的I/O为低电平)
再让四列为0,检测哪一行被按下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| unsigned char MatrixKey_flip_scan(void)
{
unsigned char KeyNumber=0;
P1=0x0f;
if(P1!=0x0f)
{
Delay_ms(20);
if(P1!=0x0f)
{
P1=0x0f;
switch(P1)
{
case(0X07): KeyNumber=1;break;
case(0X0b): KeyNumber=2;break;
case(0X0d): KeyNumber=3;break;
case(0X0e): KeyNumber=4;break;
}
P1=0Xf0;
switch(P1)
{
case(0X70): KeyNumber=KeyNumber;break;
case(0Xb0): KeyNumber=KeyNumber+4;break;
case(0Xd0): KeyNumber=KeyNumber+8;break;
case(0Xe0): KeyNumber=KeyNumber+12;break;
}
while(P1!=0xf0);
}
}
else
KeyNumber=0;
return KeyNumber;
}
|
6-1 矩阵键盘读取并显示在LCD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| #include <REGX52.H>
#include "delay.h"
#include "LCD1602.h"
#include "MatrixKey.h"
unsigned char KeyNum=0;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"zzxnb666");
while(1)
{
KeyNum=MatrixKey_flip_scan();
if(KeyNum)
{
LCD_ShowNum(2,1,KeyNum,2);
}
}
}
|
6-2 矩阵键盘密码锁
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
| #include <REGX52.H>
#include "delay.h"
#include "LCD1602.h"
#include "MatrixKey.h"
unsigned char KeyNum,Count=0;
unsigned int PassWord=0;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"Password:");
while(1)
{
KeyNum=MatrixKey_flip_scan();
if(KeyNum)
{
if(KeyNum<=10)
{
if(Count<4)
{
PassWord*=10;
PassWord+=KeyNum%10;
}
Count++;
LCD_ShowNum(2,1,PassWord,4);
}
if(KeyNum==11)
{
if(PassWord==2345)
{
LCD_ShowString(1,14,"OK ");
PassWord=0;
Count=0;
LCD_ShowNum(2,1,PassWord,4);
}
else
{
LCD_ShowString(1,14,"ERR");
PassWord=0;
Count=0;
LCD_ShowNum(2,1,PassWord,4);
}
}
if(KeyNum==12)
{
PassWord=0;
Count=0;
LCD_ShowNum(2,1,PassWord,4);
}
}
}
}
|
中断系统(重要)
中断概念
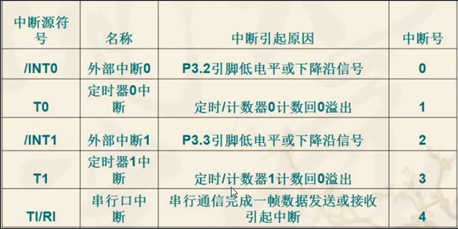
中断源:引起中断的源头
中断优先级:中断允许多个中断源(外部中断,串口中断,定时器中断……)存在,当多个中断源同时出现时,谁的中断优先级高就先相应谁,先执行高的再执行低的,然后再返回主程序。若两个中断优先级相同,通过查询次序来决定谁先(有一个固定的顺序)。
中断嵌套:当执行一个中断时,若此时出现了一个比它优先级更高的中断,则要转向执行高优先级的,然后再返回优先级低的那个继续执行,然后再返回主程序。对于51来说比较少,对于STM32,DSP等中断更复杂,则更容易出现中断嵌套。
中断的开启关闭,使用哪一个中断等等 都是有特殊功能寄存器来设置的
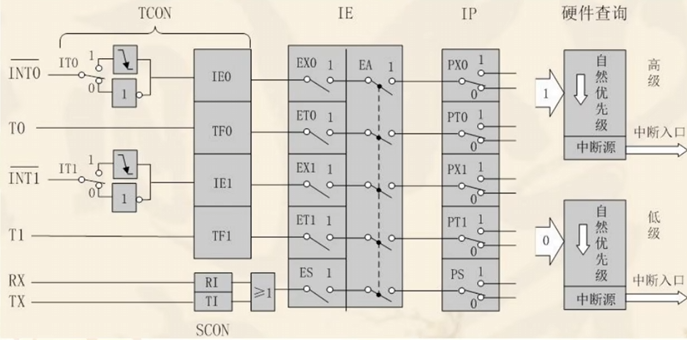
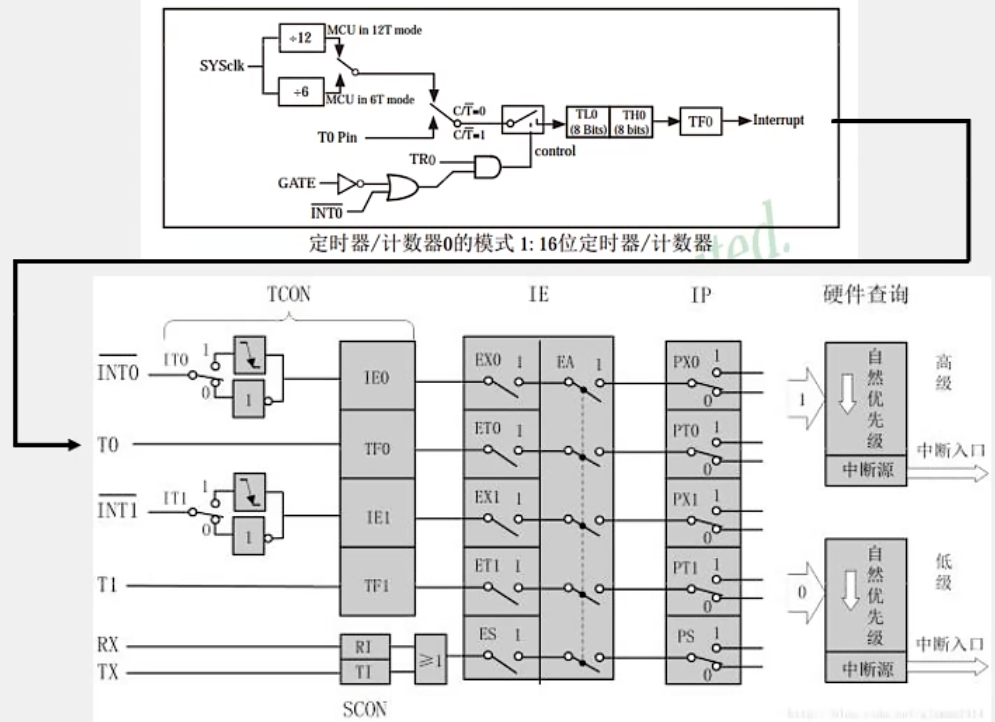
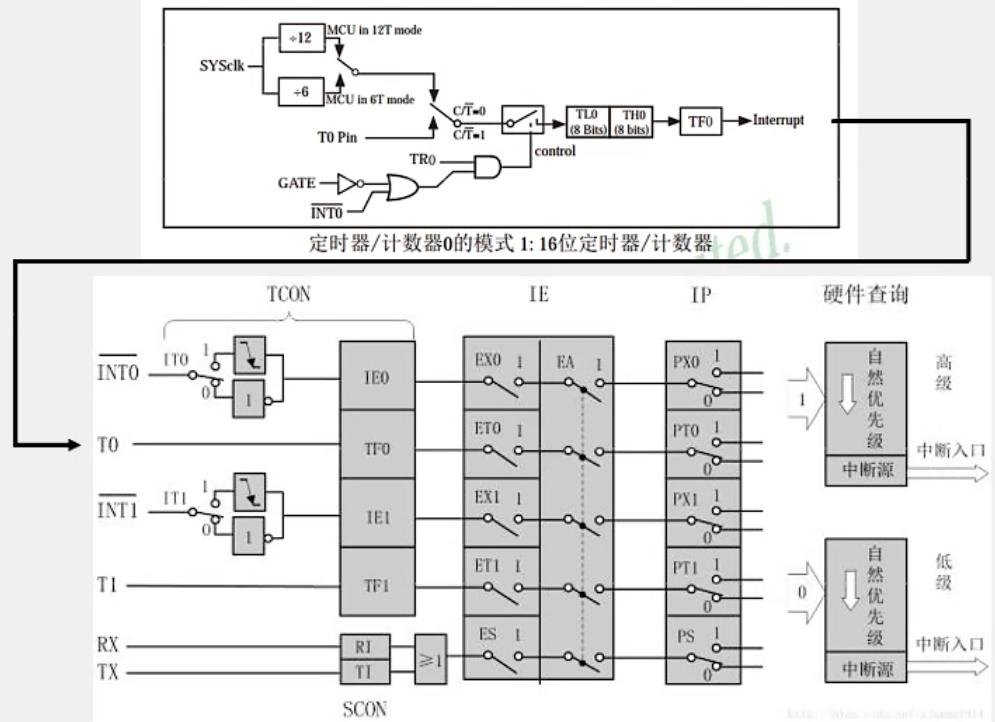
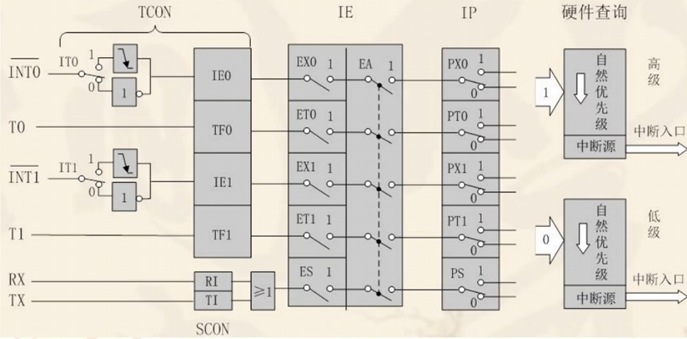
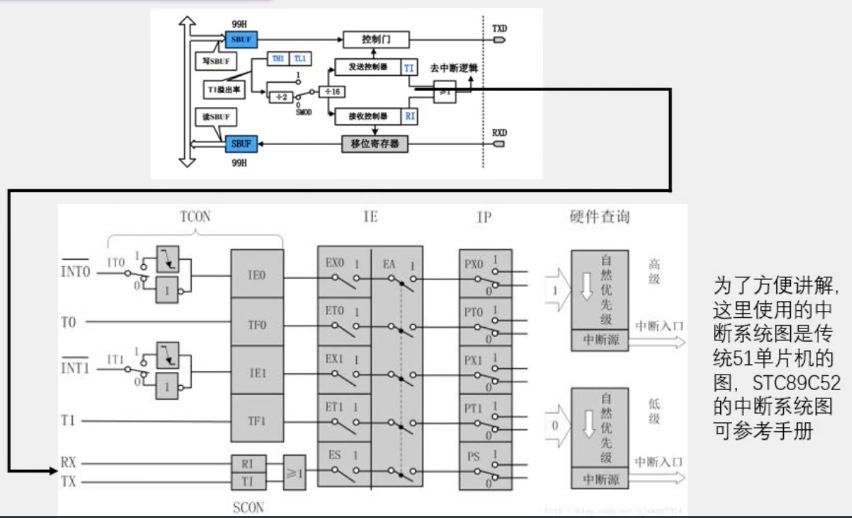
中断结构
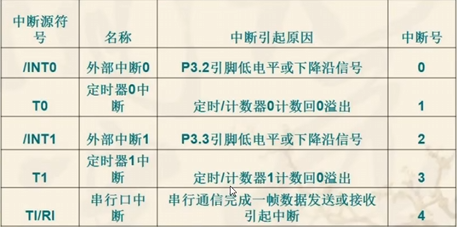
8个中断请求源:INT0,INT1,INT2,INT3,TIM0,TIM1,TIM2,UART 加粗部分对于所有51内核的单片机都有
所有中断都有4个中断优先级
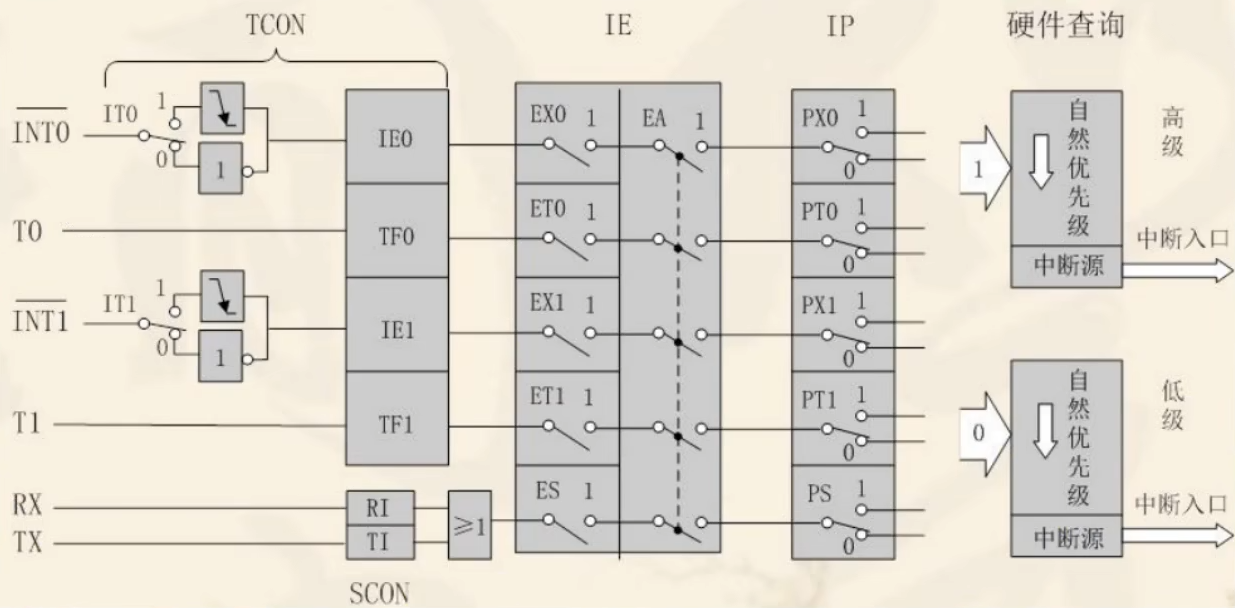
INT0的IT0决定的是下降沿触发还是低电平触发,IE0是中断标志位(当中断源到来时由单片机自动置1),EA为全局总中断,IP是用来设置中断优先级
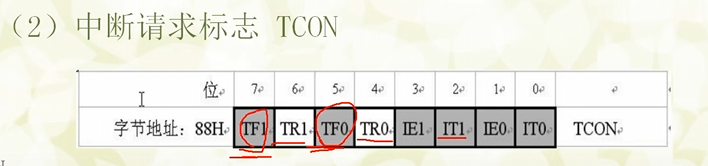
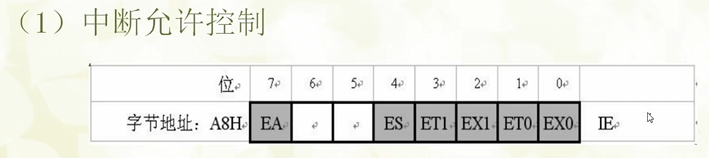
TCON(中断请求标志),IE(中断允许控制),IP都是寄存器
中断寄存器
TCON(中断请求标志)
IE(中断允许控制)
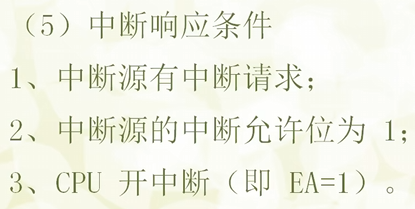
中断响应条件
中断优先级

中断号
外部中断
51内核的单片机都有INT0,INT1;STC89C5X提供了4个外部中断,INT0,INT1,INT2,INT3
INT0的IT0决定的是下降沿触发还是低电平触发,IE0是中断标志位(当中断源到来时由单片机自动置1),EA为全局总中断,IP是用来设置中断优先级
1
2
3
4
5
6
7
| EA=1;
EX0=1;
IT0=0/1;
void int0() interrupt 0
{
}
|
对于STC89C52单片机,INT0,INT1对应P3.2,P3.3 这里我们使用按键模拟外部中断触发
外部中断实验
通过独立按键K3,K4控制LED1,LED2亮灭。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
| #include <REGX52.H>
#include "delay.h"
#define KEY3 P3_2
#define KEY4 P3_3
#define LED1 P2_0
#define LED2 P2_1
void exti0_init()
{
EA=1;
EX0=1;
IT0=1;
}
void exti1_init()
{
EA=1;
EX1=1;
IT1=1;
}
void main()
{
exti0_init();
exti1_init();
while(1)
{
}
}
void exti0() interrupt 0
{
Delay_ms(20);
if(KEY3==0)
{
LED1=!LED1;
}
}
void exti1() interrupt 2
{
Delay_ms(20);
if(KEY4==0)
{
LED2=!LED2;
}
}
|
对其模块化封装:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
|
#include <REGX52.H>
#include "exti.h"
void exti0_init()
{
EA=1;
EX0=1;
IT0=1;
}
void exti1_init()
{
EA=1;
EX1=1;
IT1=1;
}
void exti0() interrupt 0
{
}
void exti1() interrupt 2
{
}
|
1
2
3
4
5
6
7
| #ifndef __EXTI_H__
#define __EXTI_H__
void exti0_init();
void exti1_init();
#endif
|
定时器(重要)
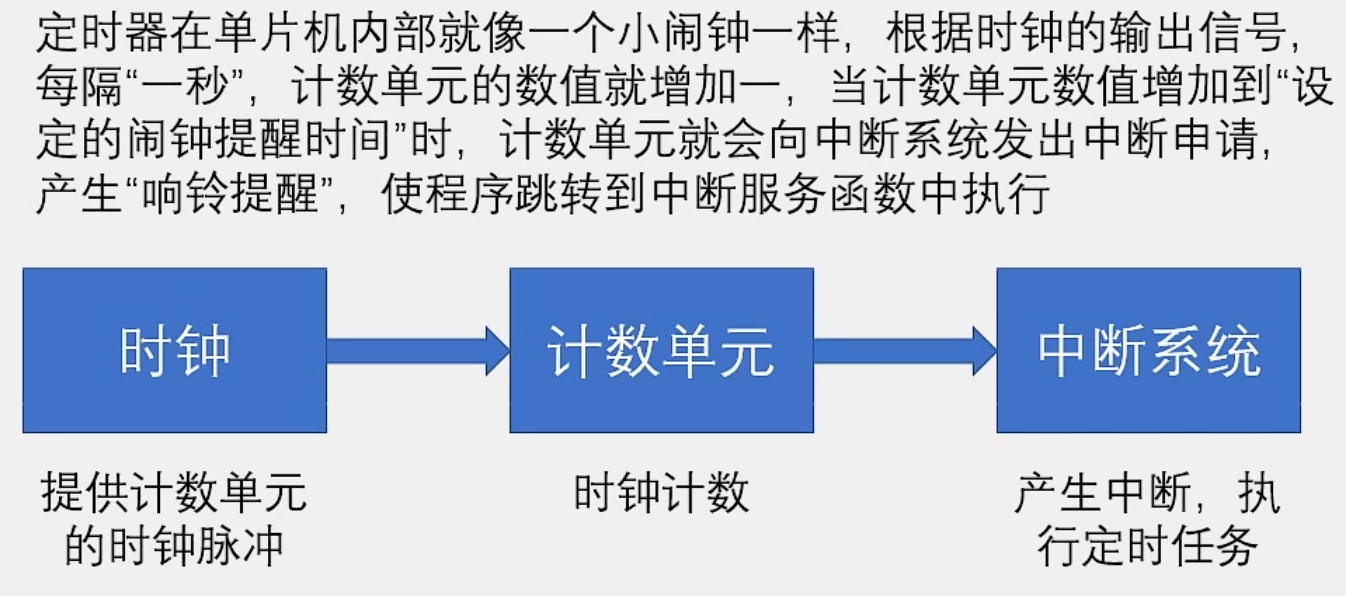
定时器作用:
1.可用于计时系统,实现软件计时,或者使程序每隔一固定时间完成一项操作
2.替代长时间delay,提高CPU的运行效率和处理速度
51内核的定时器都有T0,T1,对于STCC9852单片机,还有T3
51单片机有两组定时计数器,既可以定时又可以计数;
定时器计数器与单片机CPU相互独立,工作过程自动完成,不需要CPU参与;
定时计数器是根据机器内部的时钟(使用定时功能)或外部的脉冲信号(使用计数功能)来对寄存器进行加1;
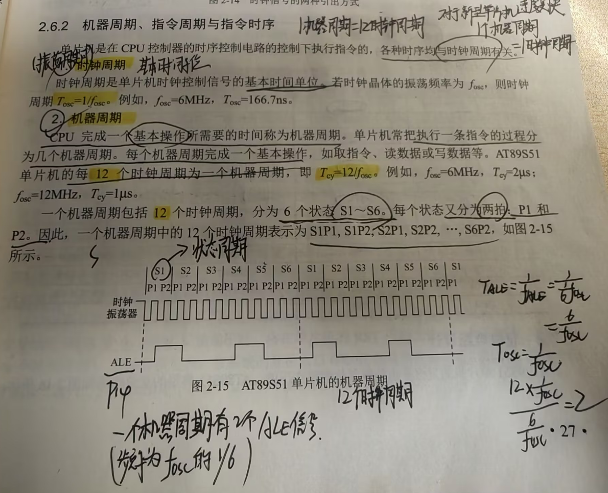
CPU时序周期相关知识
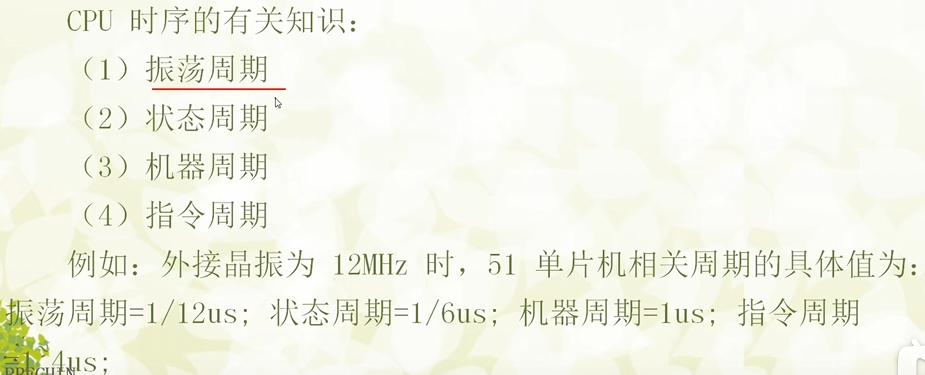
时钟周期(振荡周期):单片机控制信号的基本时间单位。若时钟晶体震荡频率为fosc,则时钟周期Tosc=1/fosc.
机器周期:CPU完成一个基本操作所需要的时间为机器周期。单片机通常把执行一条指令的过程分为几个机器周期,AT89S51单片机每12个时钟周期为一个机器周期。Tcy=12Tosc=12/fosc。eg:fosc=12MHZ,Tcy=12/12=1us.
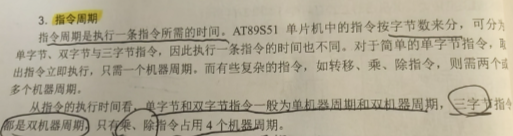
指令周期:执行一条指令所需要的时间。
寄存器
详细的每一位介绍可以看参考手册。
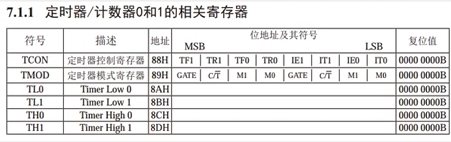
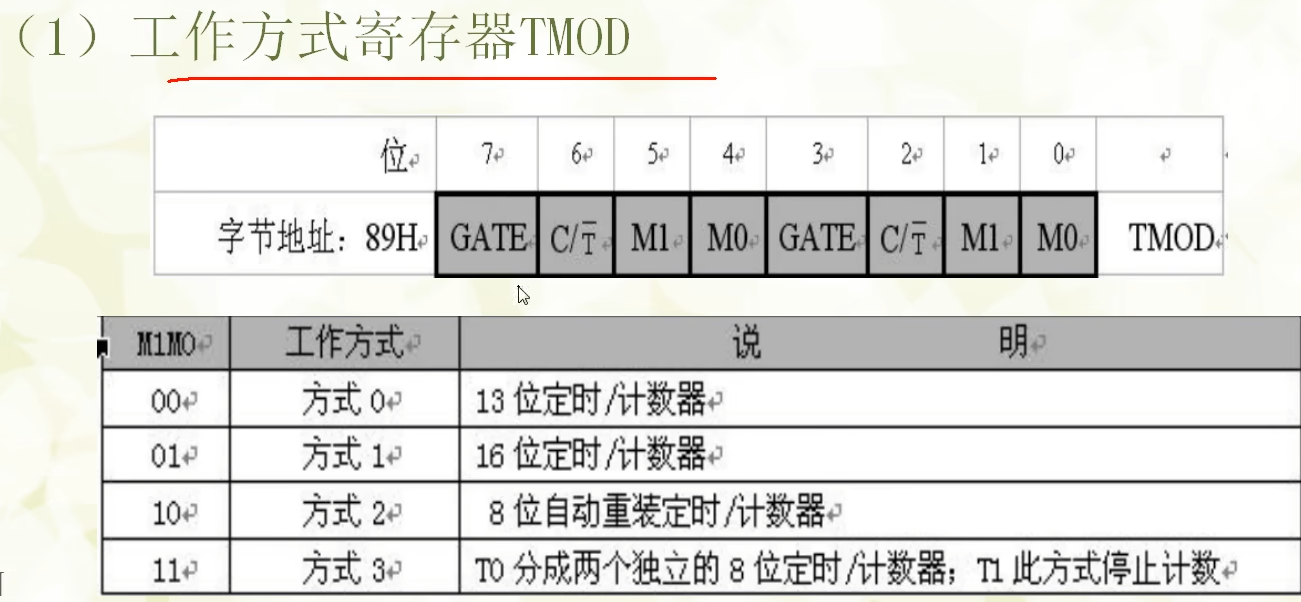
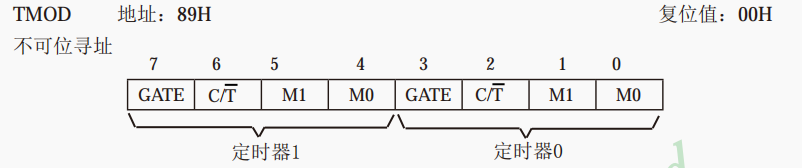
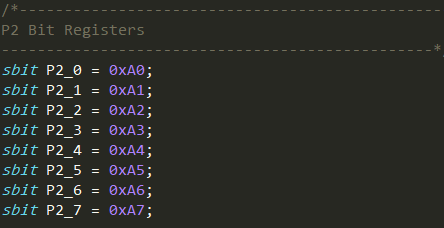
不可位寻址 只能对寄存器整体赋值
一般用方式1,方式2(串口波特率生成)。TMOD高四位控制T1,低四位控制T0
GATE:门控位 1:(只需TR0/TR1为1来决定定时计数器工作)0:(除了TR0/TR1还需INT0/INT1为1来决定定时计数器工作)
C/T: 1(计数模式)0(定时模式)
M1,M0:工作方式
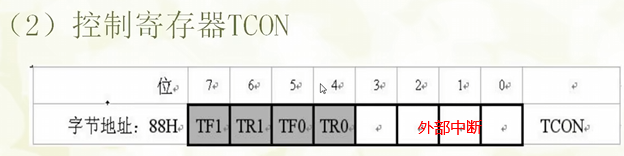

可位寻址 可对寄存器中的每一位单独赋值
TF1:T1溢出标志位,溢出时自动置1,向CPU发出中断请求
TR1: T1定时计数器运行控制位 1:开始工作 0:停止工作
工作方式(原理)
方式0:
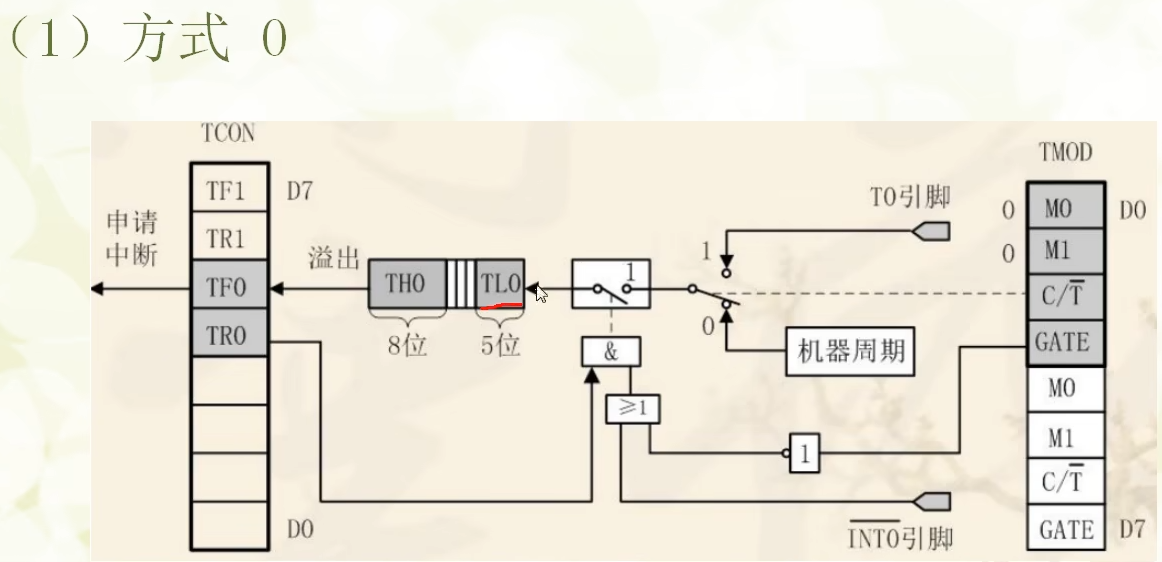
C/T 若为1 计数器模式 将开关打到1 ,若为0 定时器模式 将开关打到0
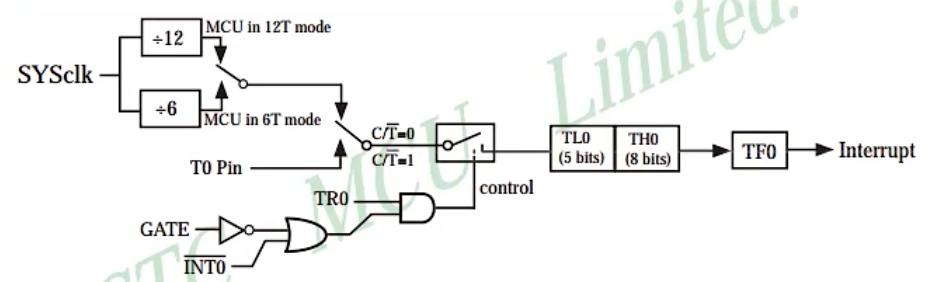
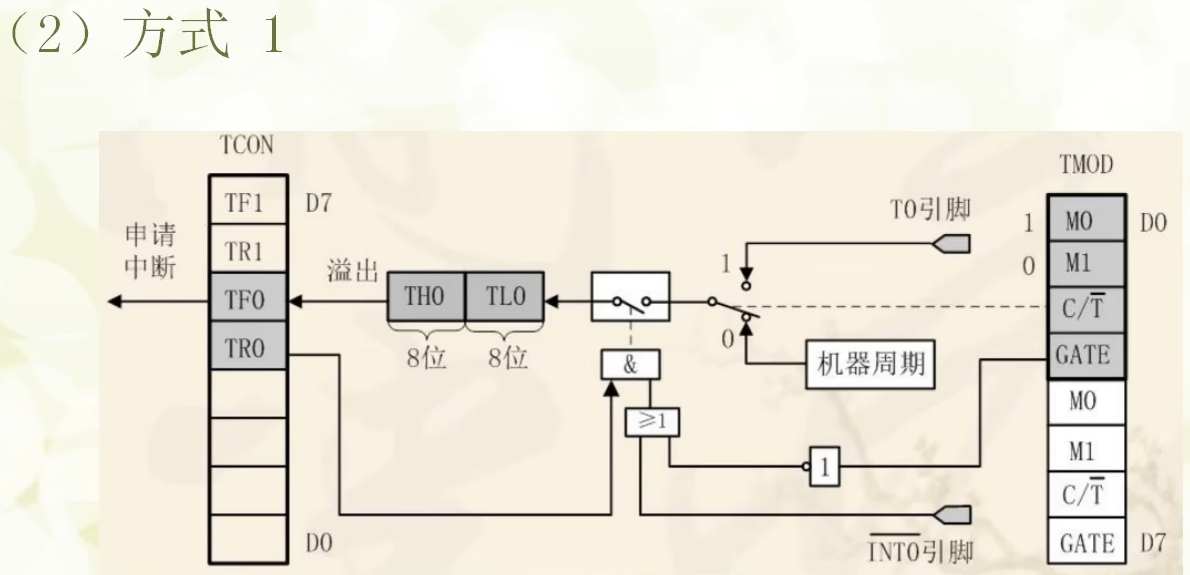
方式1(常用):
不会自动装载初值 每次溢出进入中断后需要我们手动装载
每来一个脉冲,16位(最大为65535)的计数器(TH,TL)里面的值就会自动加1,当计数达到最大值65535后,再+1就会溢出,TF0置1,向中断系统申请中断
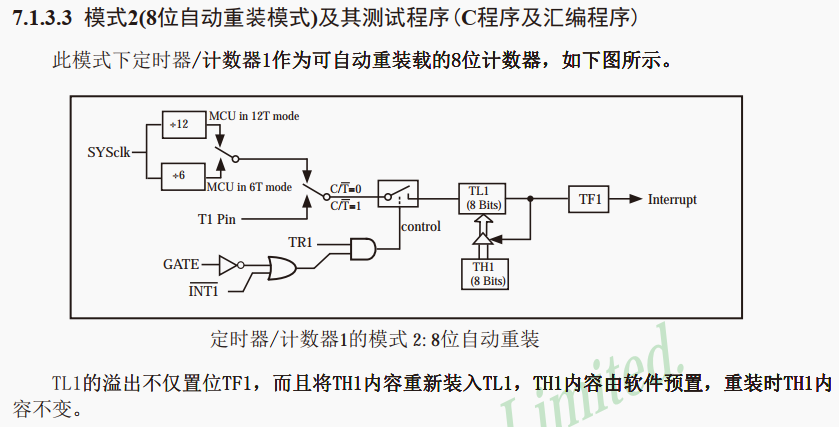
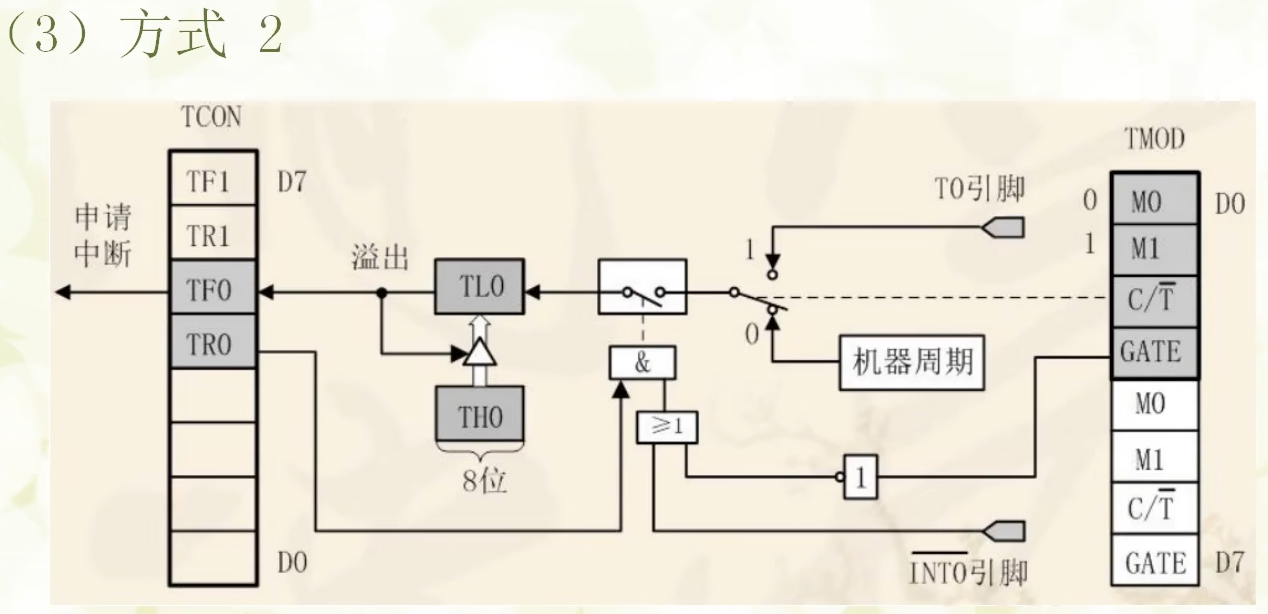
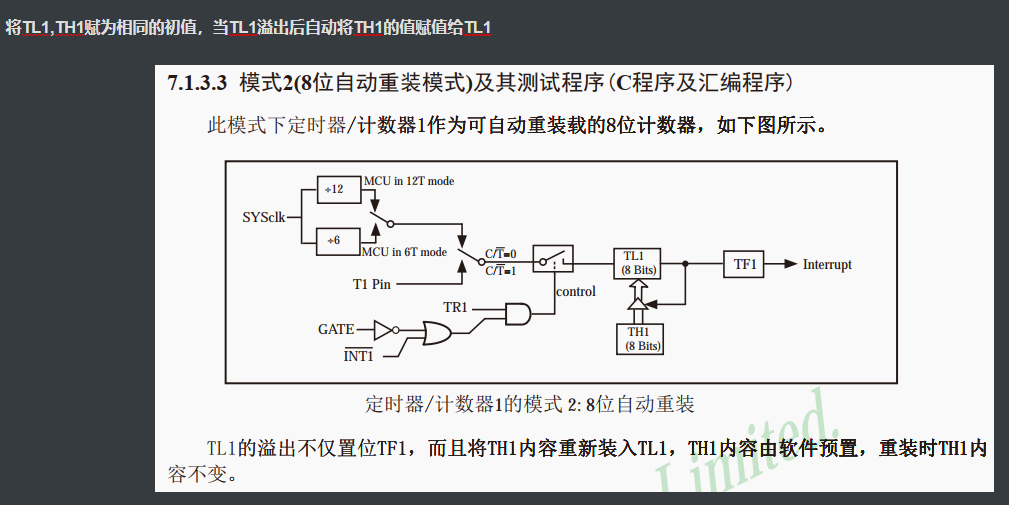
方式2:
自动重装载(初值),用于串口波特率
将TL1,TH1赋为相同的初值,当TL1溢出后自动将TH1的值赋值给TL1
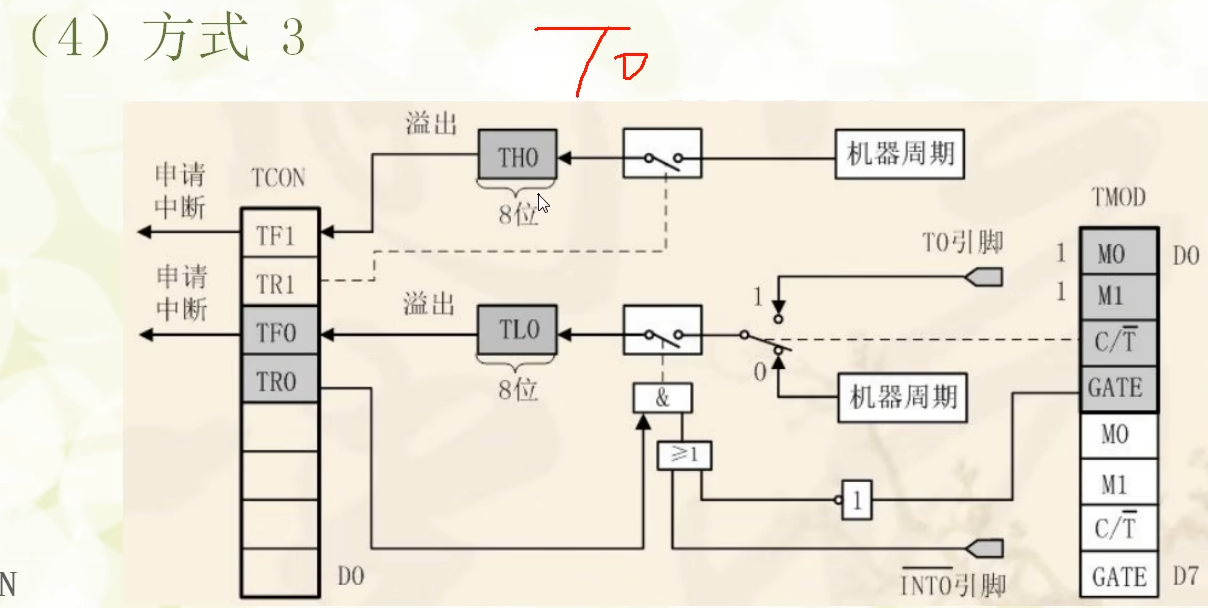
方式3:
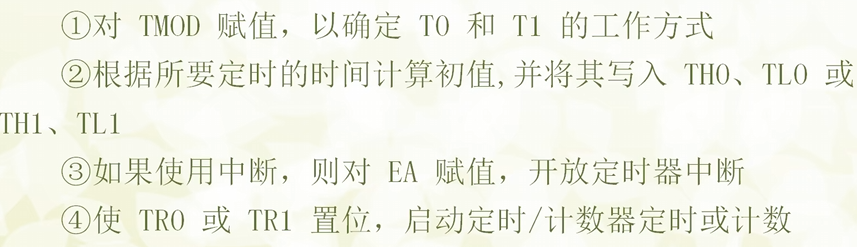
定时器配置(重要)
其实就是根据工作方式的图把相应的寄存器配一下
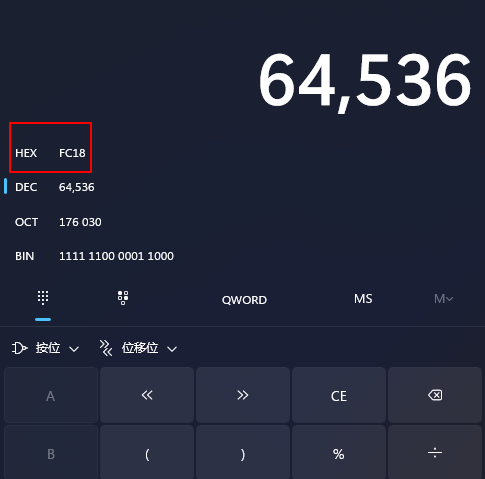
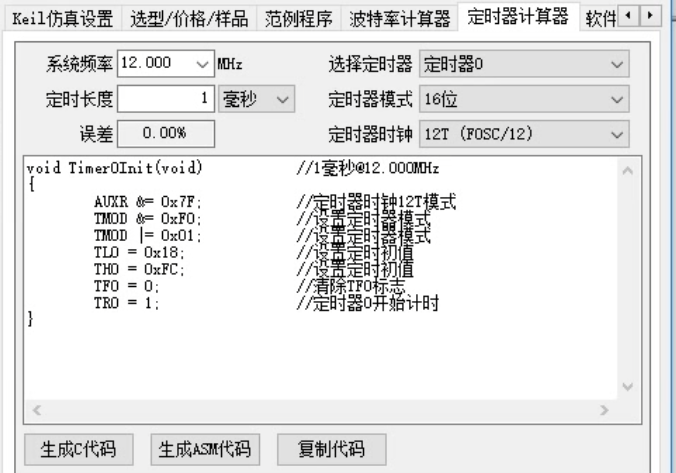
外部晶振12MHZ,则机器周期=1us,若想让定时器定时1ms
1ms/1us=1000次 初值=65536-1000=64536 将其转换为16进制为0xFC18,高八位写入TH,低八位写入TL
当要计时的时间比较大,次数超过65536的话,如500ms,我们可以设置定时器1ms,然后在定时器中断里设置一个变量cnt,每次进入中断时加一,当cnt=500时即为500ms.
也可以这样算:
2^16=65536 2^8=256
高八位=65535/(2^8),低八位=65535%(2^8)) 类比十进制:1880 取高2位和低2位,高二位=1880/(10^2)=18,低二位=1880%(10^2)=80)
1
2
| TH=65536/256;
TL=65536%256;
|
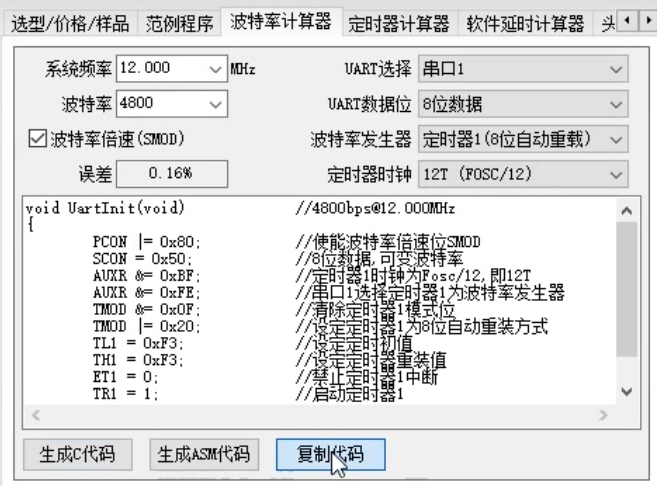
此外,在掌握了计算方法后,也可以使用定时器计算工具提高效率:

STC-ISP
1
2
3
4
5
6
7
8
9
10
11
12
13
| void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFC;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
|
可位寻址的寄存器可以对它的每一位单独赋值,不可位寻址的寄存器只能整体赋值
定时器实验
1.通过定时器0中断控制D1指示灯间隔1s闪烁,定时器1中断控制D2指示灯间隔0.5s闪烁。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
| #include <REGX52.H>
#include "delay.h"
#define LED1 P2_0
#define LED2 P2_1
typedef unsigned char u8;
typedef unsigned int u16;
void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFC;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
void TIM1_Init(void)
{
TMOD&=0x0F;
TMOD|=0x10;
TH1=0xFC;
TL1=0x18;
ET1=1;
EA=1;
TR1=1;
}
void main()
{
TIM0_Init();
TIM1_Init();
while(1)
{
}
}
void TIM0() interrupt 1
{
static u16 cnt=0;
TH0=0xFC;
TL0=0x18;
cnt++;
if(cnt==1000)
{
LED1=!LED1;
cnt=0;
}
}
void TIM1() interrupt 3
{
static u16 cnt=0;
TH1=0xFC;
TL1=0x18;
cnt++;
if(cnt==500)
{
LED2=!LED2;
cnt=0;
}
}
|
对定时器文件进行模块化封装:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
|
#include <REGX52.H>
#include "tim.h"
#define LED1 P2_0
#define LED2 P2_1
void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFC;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
void TIM1_Init(void)
{
TMOD&=0x0F;
TMOD|=0x10;
TH1=0xFC;
TL1=0x18;
ET1=1;
EA=1;
TR1=1;
}
void TIM0() interrupt 1
{
static unsigned int cnt=0;
TH0=0xFC;
TL0=0x18;
cnt++;
if(cnt==1000)
{
LED1=!LED1;
cnt=0;
}
}
void TIM1() interrupt 3
{
static unsigned int cnt=0;
TH1=0xFC;
TL1=0x18;
cnt++;
if(cnt==500)
{
LED2=!LED2;
cnt=0;
}
}
|
1
2
3
4
5
6
7
8
|
#ifndef __TIM_H__
#define __TIM_H__
void TIM0_Init(void);
void TIM1_Init(void);
#endif
|
2.定时器时钟
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
#include <REGX52.H>
#include "delay.h"
#include "tim.h"
#include "key.h"
#include "LCD1602.h"
extern unsigned char Sec;
extern unsigned char Min;
extern unsigned char Hour;
void main()
{
TIM0_Init();
LCD_Init();
LCD_ShowString(1,1,"Clock:");
LCD_ShowString(2,1," : :");
while(1)
{
LCD_ShowNum(2,1,Hour,2);
LCD_ShowNum(2,4,Min,2);
LCD_ShowNum(2,7,Sec,2);
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
|
#include <REGX52.H>
#include "tim.h"
#include "INTRINS.H"
#define LED1 P2_0
#define LED2 P2_1
unsigned char Sec=55;
unsigned char Min=59;
unsigned char Hour=23;
void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFC;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
void TIM1_Init(void)
{
TMOD&=0x0F;
TMOD|=0x10;
TH1=0xFC;
TL1=0x18;
ET1=1;
EA=1;
TR1=1;
}
void TIM0() interrupt 1
{
static unsigned int cnt=0;
TH0=0xFC;
TL0=0x18;
cnt++;
if(cnt==1000)
{
cnt=0;
Sec++;
if(Sec>=60)
{
Sec=0;
Min++;
if(Min>=60)
{
Min=0;
Hour++;
if(Hour>=24)
{
Hour=0;
}
}
}
}
}
void TIM1() interrupt 3
{
static unsigned int cnt=0;
TH1=0xFC;
TL1=0x18;
cnt++;
if(cnt==500)
{
LED2=!LED2;
cnt=0;
}
}
|
PWM
直流电机

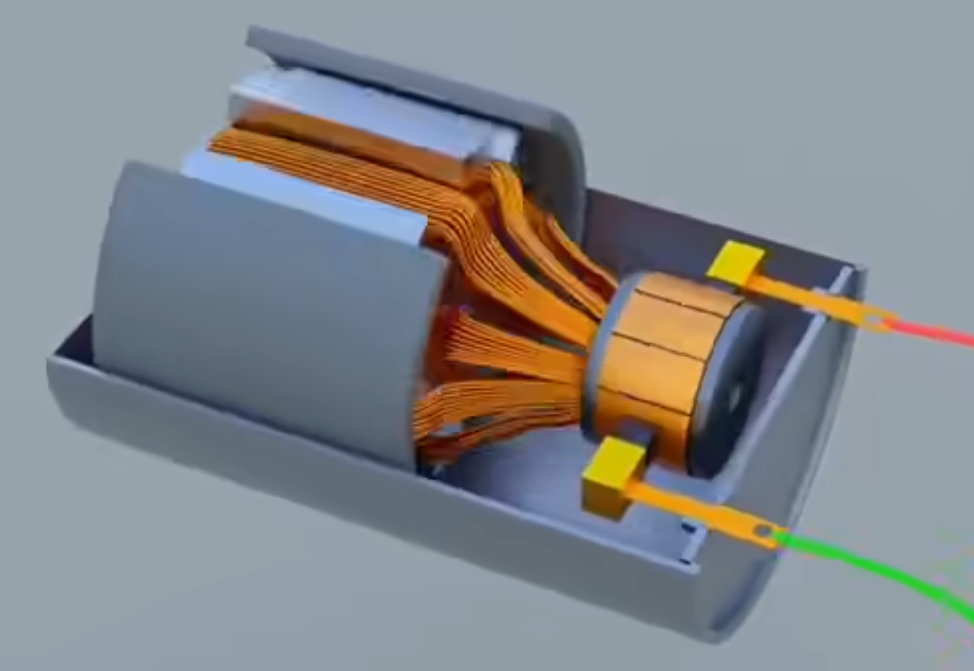
直流有刷电机主要由永磁体(定子),线圈(转子),换向器组成;直流无刷电机主要由永磁体(转子),绕组线圈(定子),少了碳刷和换向器的摩擦。
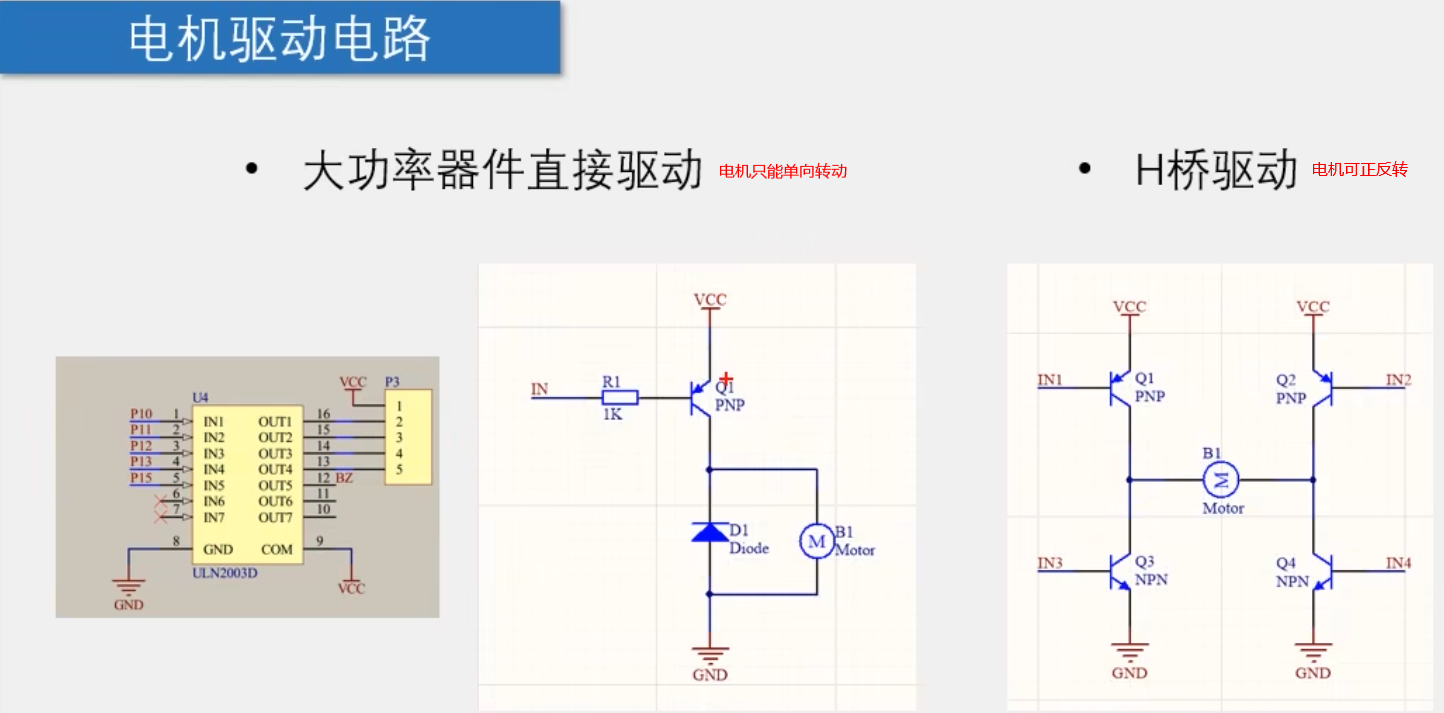
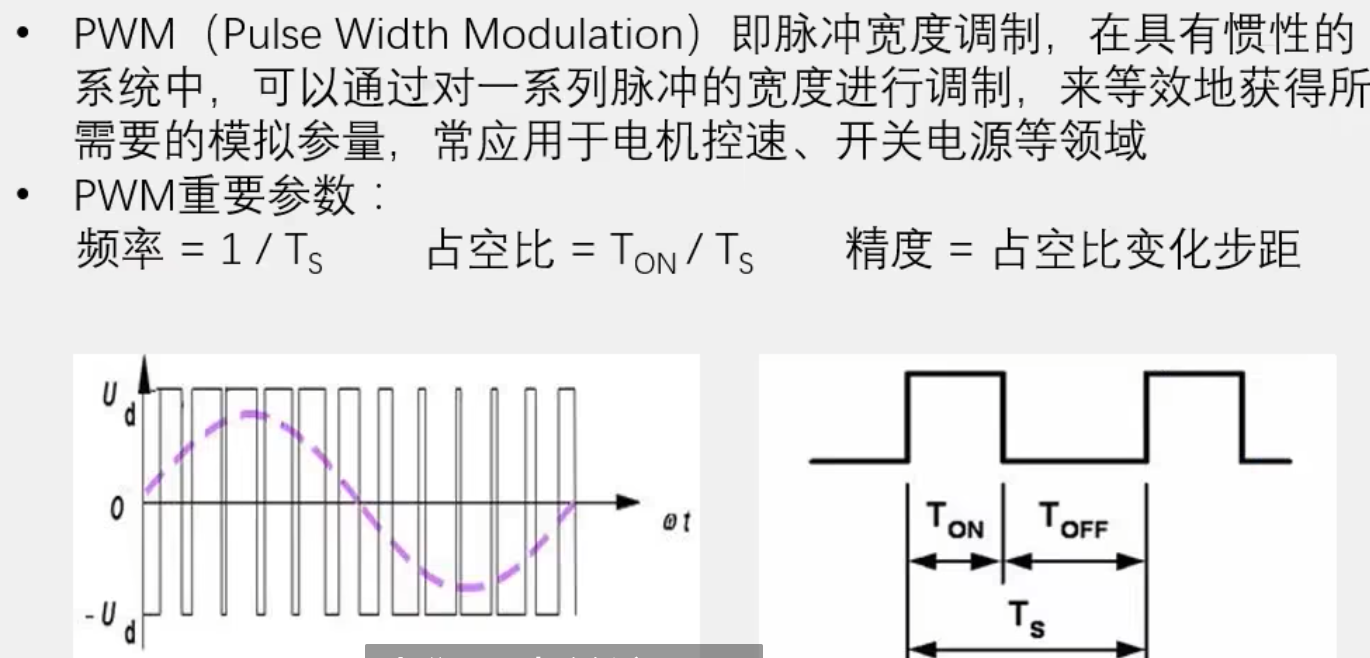
PWM介绍
电机调速不能和LED呼吸灯一样接一个滑动变阻器就完事,因为在驱动电机的过程中会产生很大电流,对于电机来说会转化为机械能没事,但对于滑动变阻器,电流会转化为热能使其损坏。
最新的单片机TIM定时器都有输出PWM的功能,但STC89C52没有,我们用定时器中断来实现,同时也会方便后面学习其它单片机的理解。
实验1:LED呼吸灯
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| #include <REGX52.H>
#include <INTRINS.H>
#include "delay.h"
#define LED P2_0
void main()
{
unsigned char Time,i;
while(1)
{
for(Time=0;Time<100;Time++)
{
for(i=0;i<20;i++)
{
LED=0;
Delay_us(Time);
LED=1;
Delay_us(100-Time);
}
}
for(Time=100;Time>0;Time--)
{
for(i=0;i<20;i++)
{
LED=0;
Delay_us(Time);
LED=1;
Delay_us(100-Time);
}
}
}
}
|
实验2:直流电机调速
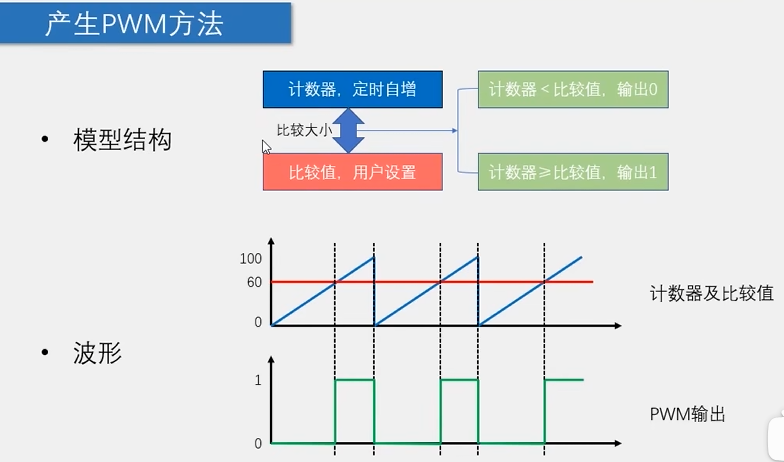
该结构与最新单片机TIM定时器PWM硬件结构相似,在这里我们用软件来模拟这一结构:
首先配置定时器,每100us进一次定时器中断,每次进入中断后计数器(Counter)+1,同时与比较值(Compare)比较,若Counter<Compare,置高电平,反之置低电平,在这里设置计数器最大到100后清0,pwm周期:100us*100=10ms ,若pwm频率过小则电机会出现抖动(频繁启动停止),故我们要让pwm频率取到一个相对大的值,这时就可等效的获得所需要的模拟参量
定时器的作用就在于生成周期为T,每个周期内高电平持续时间为Compare的波形
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
|
#include <REGX52.H>
#include "tim.h"
#include "INTRINS.H"
#define LED1 P2_0
#define LED2 P2_1
#define MOTOR P1_0
unsigned char LedMode=0;
unsigned char Counter,Compare=0;
void TIM0_Init(void)
{
TMOD&=0xF0;
TMOD|=0x01;
TH0=0xFF;
TL0=0x9C;
ET0=1;
EA=1;
TR0=1;
}
void TIM0() interrupt 1
{
TH0=0xFF;
TL0=0x9C;
Counter++;
if(Counter>=100)Counter=0;
if(Counter<Compare)
{
LED1=0;
MOTOR=1;
}
else
{
LED1=1;
MOTOR=0;
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
|
#include <REGX52.H>
#include "delay.h"
#include "tim.h"
#include "key.h"
#include "nixietube.h"
unsigned char KeyNum=0,Speed=0;
extern unsigned char Compare;
void main()
{
P2=0xfe;
TIM0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1)
{
Speed++;
if(Speed>=4)Speed=0;
switch (Speed)
{
case 0:
Compare=0;
break;
case 1:
Compare=60;
break;
case 2:
Compare=80;
break;
case 3:
Compare=100;
break;
default:
break;
}
}
NixieTube(1,Speed);
}
}
|
串口通信(重要)
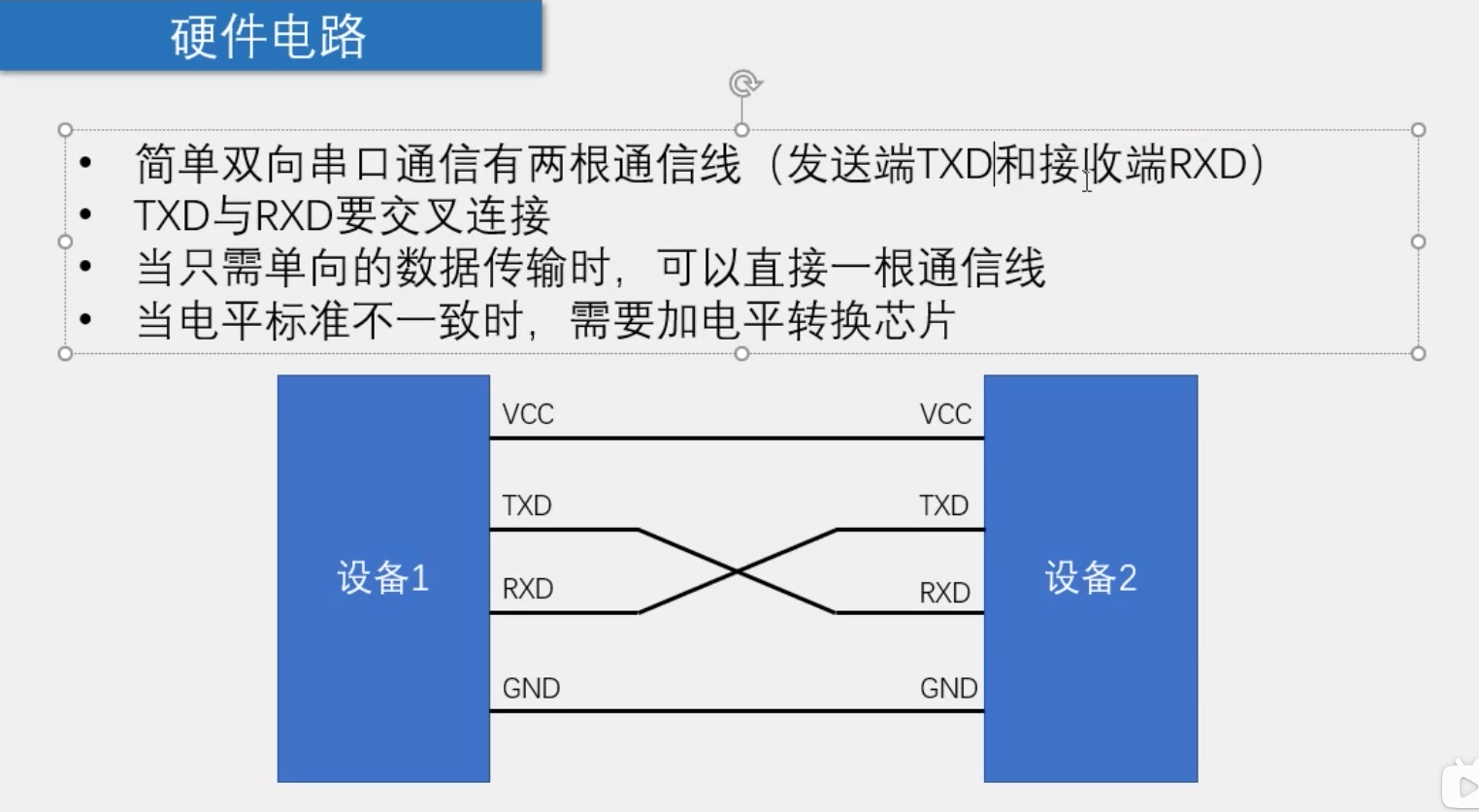
简介

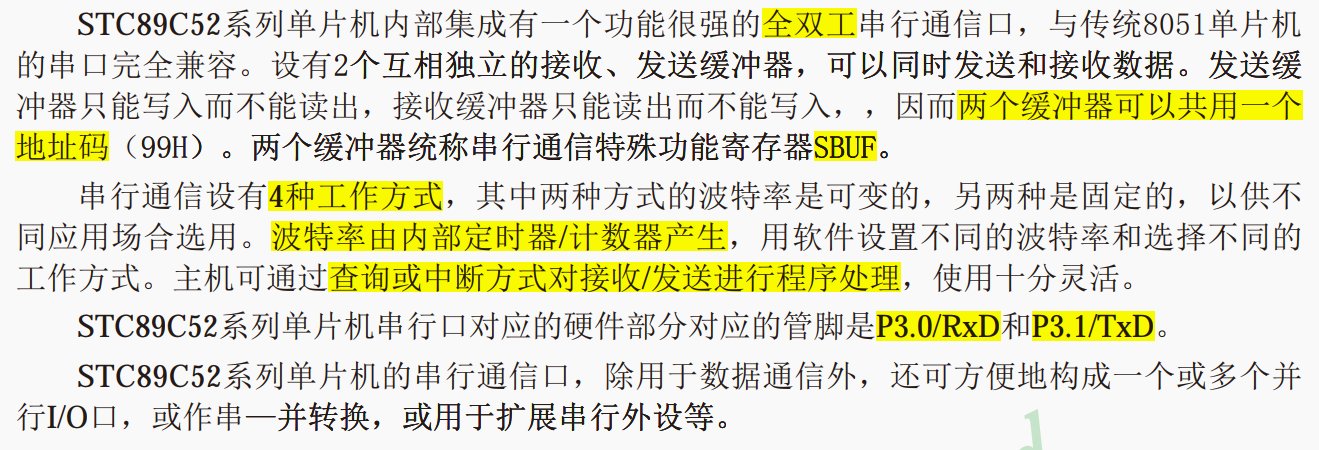

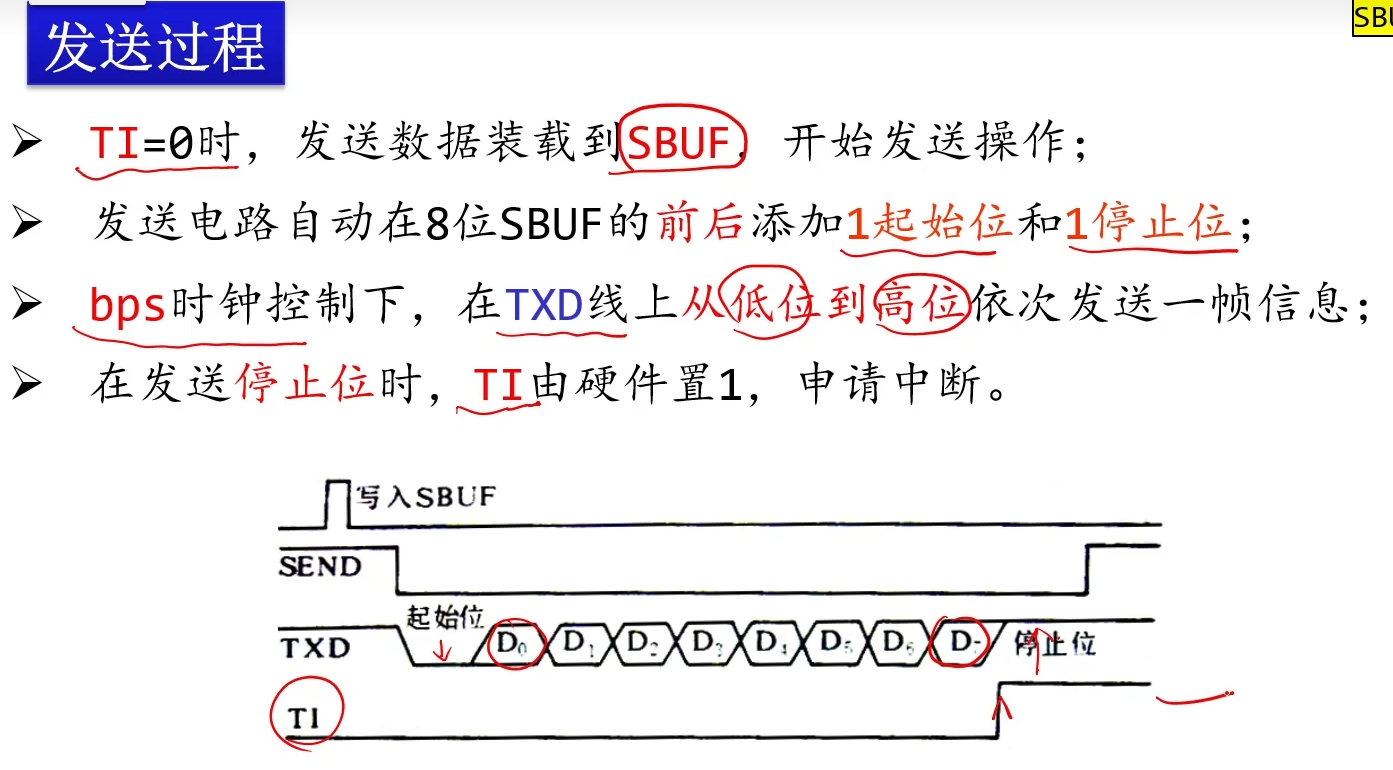
串口参数及时序图
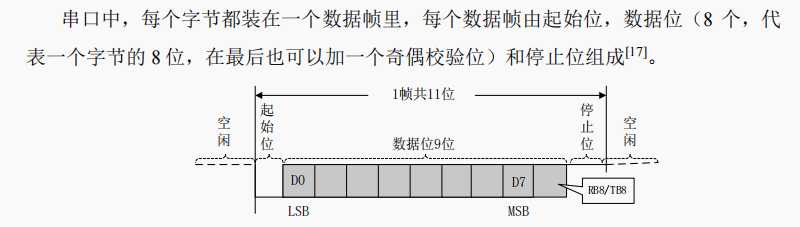
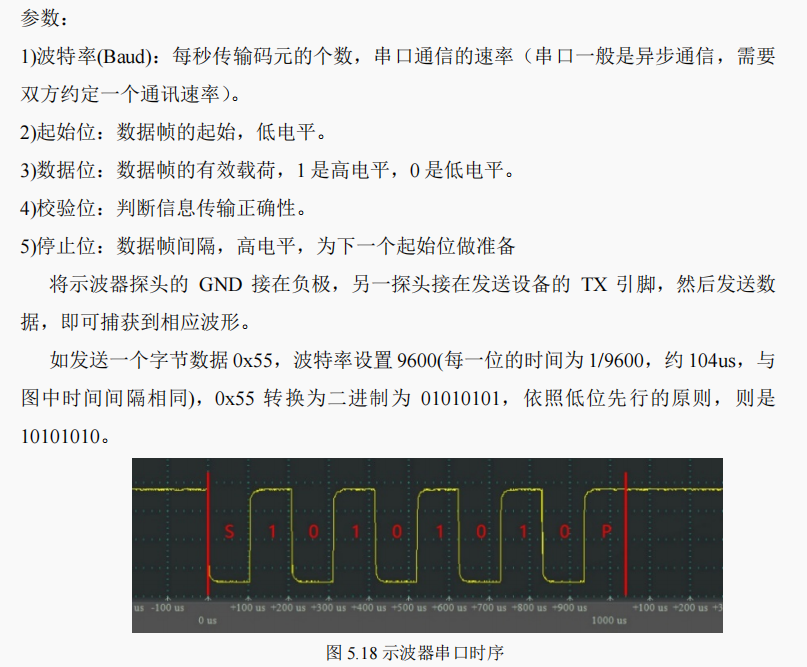
通常用的串口传输格式为:1bit起始位+8bit数据位+1bit停止位(无奇偶校验位)
波特率:每秒钟传输二进制位数 eg:波特率为115200即1s传输二进制的位数115200个
比特率:每秒钟传送二进制有效数据的位数,表示有效数据的传输速率。
计算波特率和比特率
例:在异步串行传输系统中,字符格式为:1个起始位,8个数据位、1个校验位、2个终止位。若要求每秒传送120个字符,试求传送的波特率和比特率。
解答:
根据题目给出的字符格式,有效数据为8位,一帧包含1+8+1+2=12位
故波特率为:120*(1+8+1+2)=1440 bps=1440波特
又因为有效数据位为8位,而传送一个字符需1+8+1+2=12位
故比特率为:1440*(8/12)=960 bps
(比特率还可以直接求:8*120=960 bps)
串口内部收发原理
讲解视频:https://www.bilibili.com/video/BV1344y1M7pH/?spm_id_from=333.337.search-card.all.click&vd_source=a9d487fcf1a579639c6348eb5a9321db
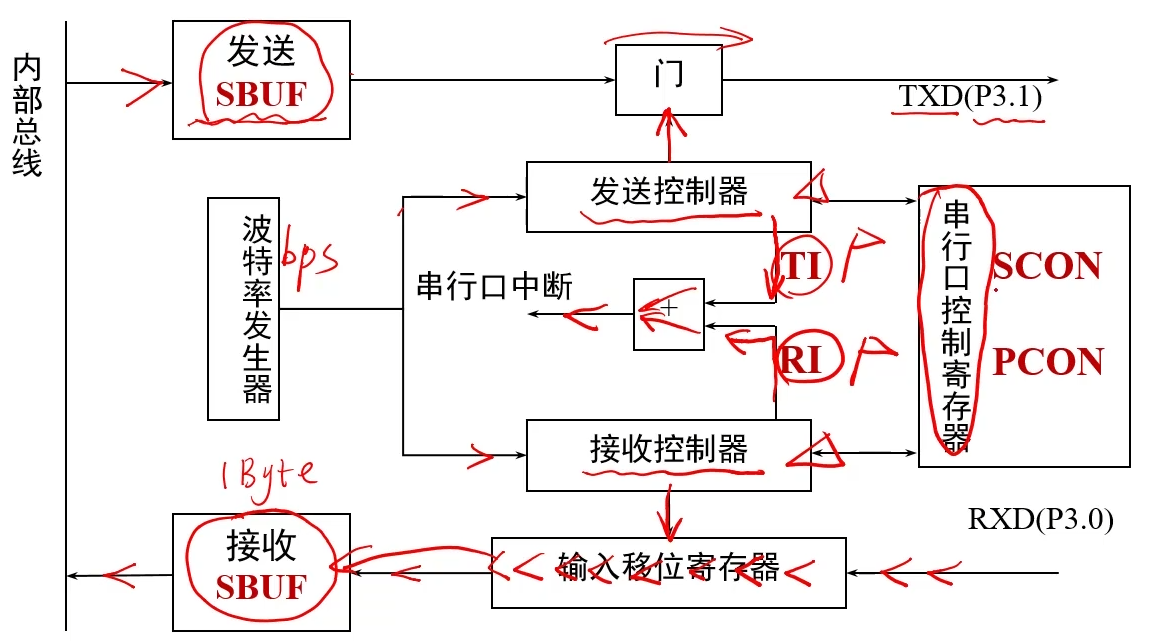
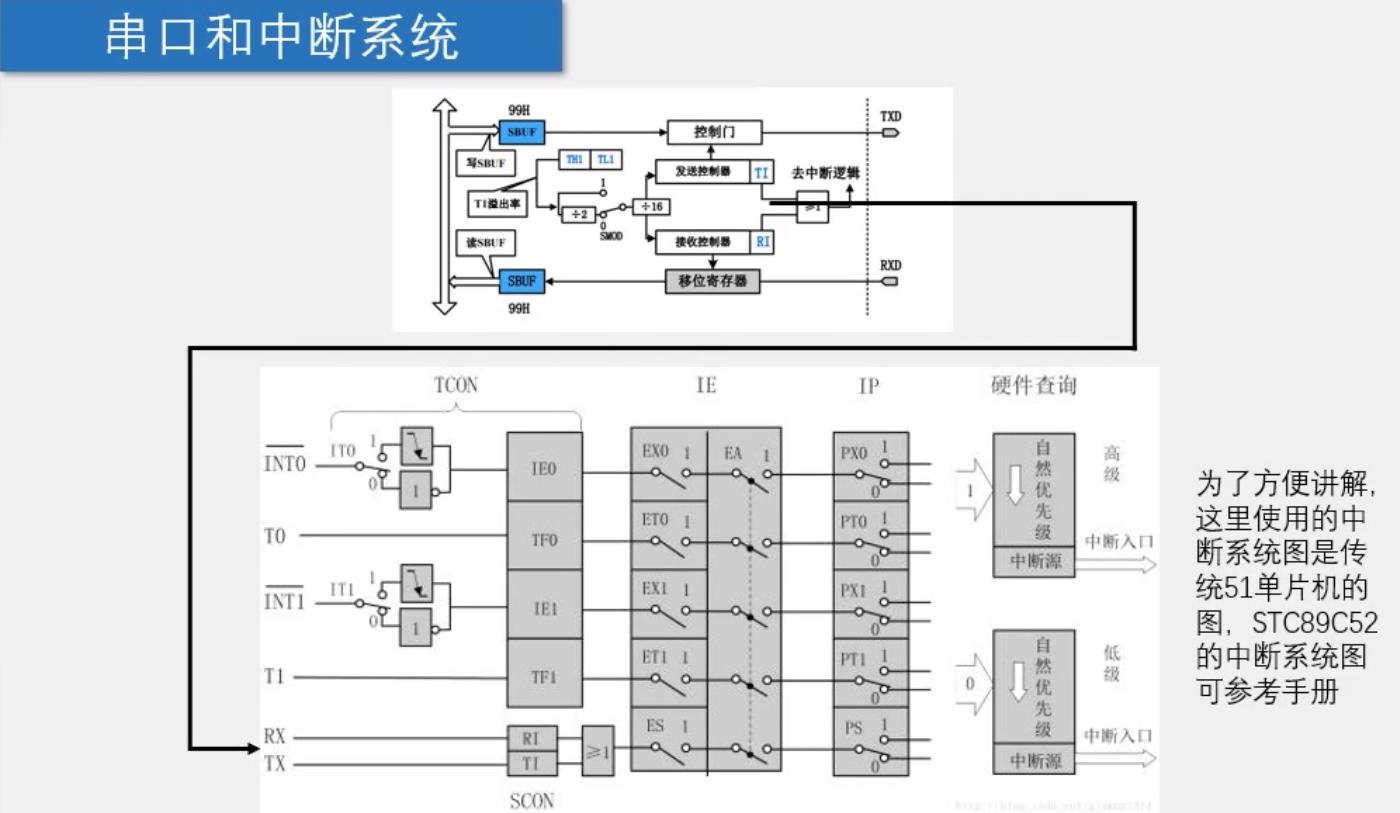
寄存器
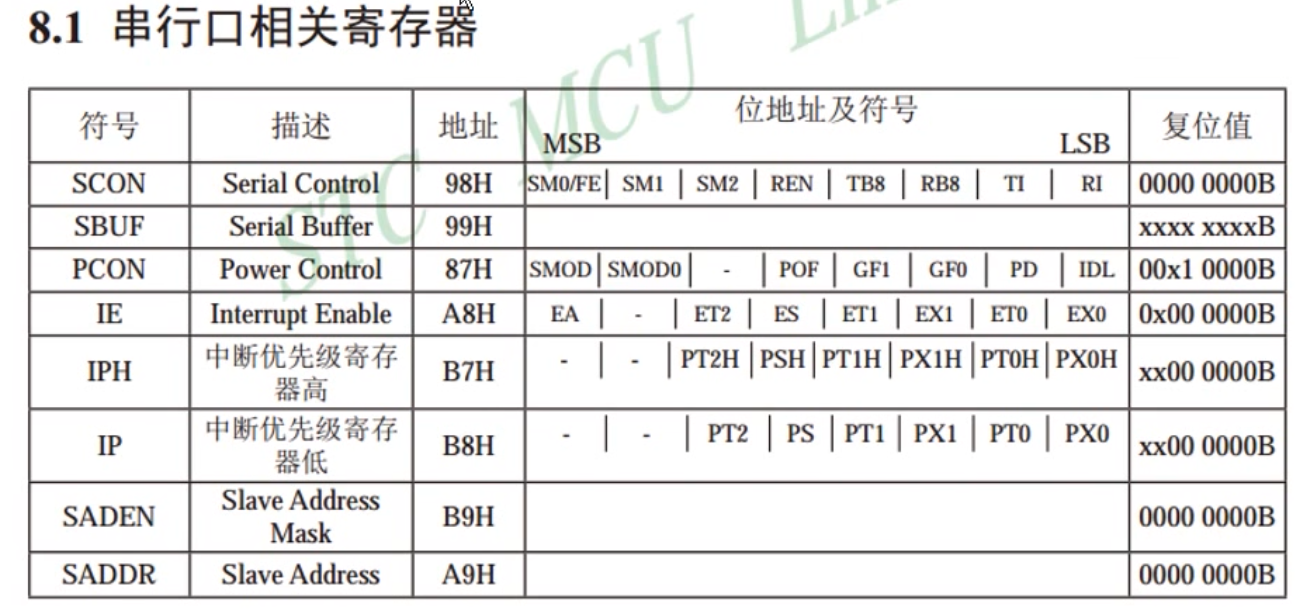
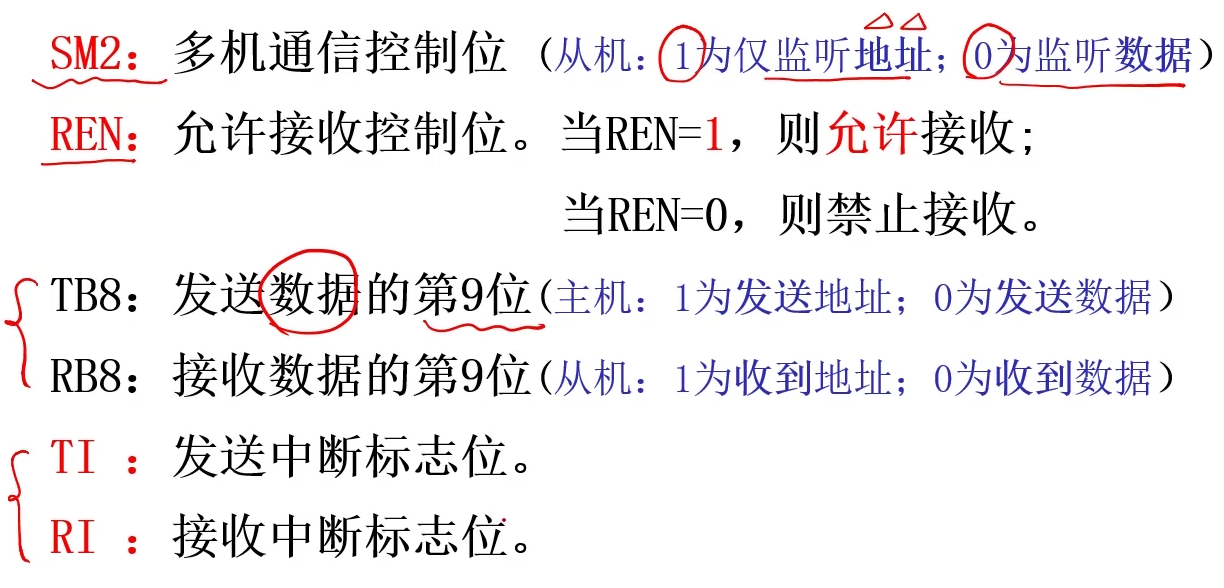


注意是发送/接收第8位后才置1

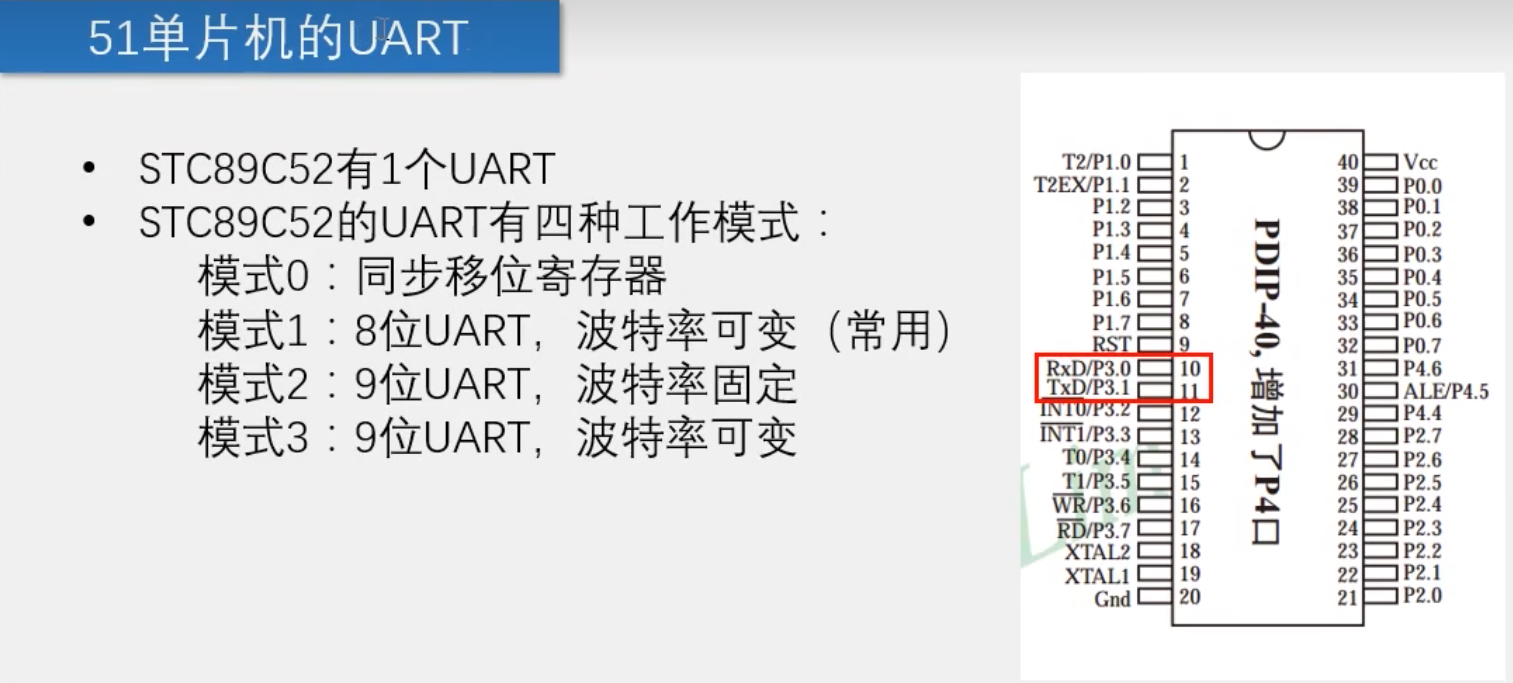
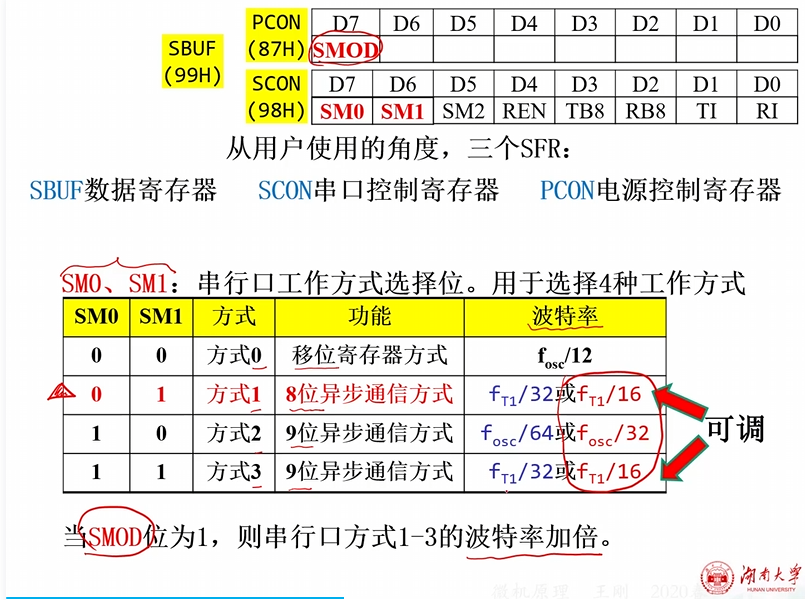
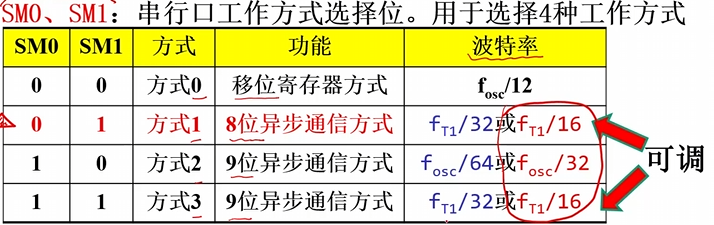
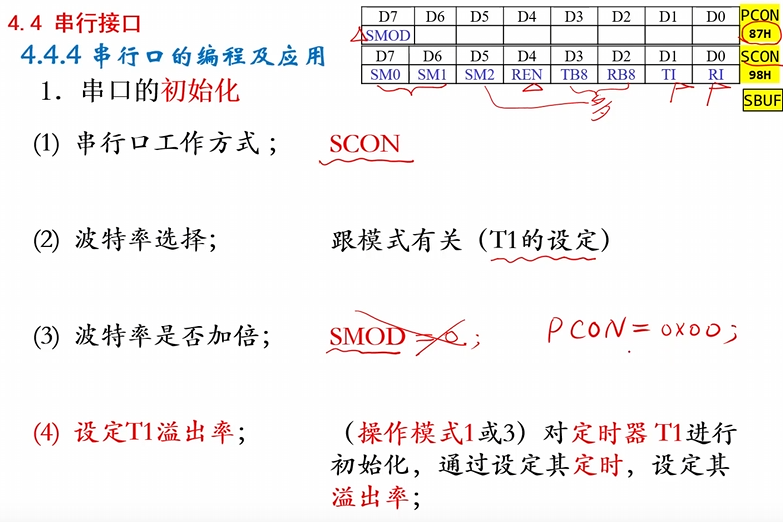
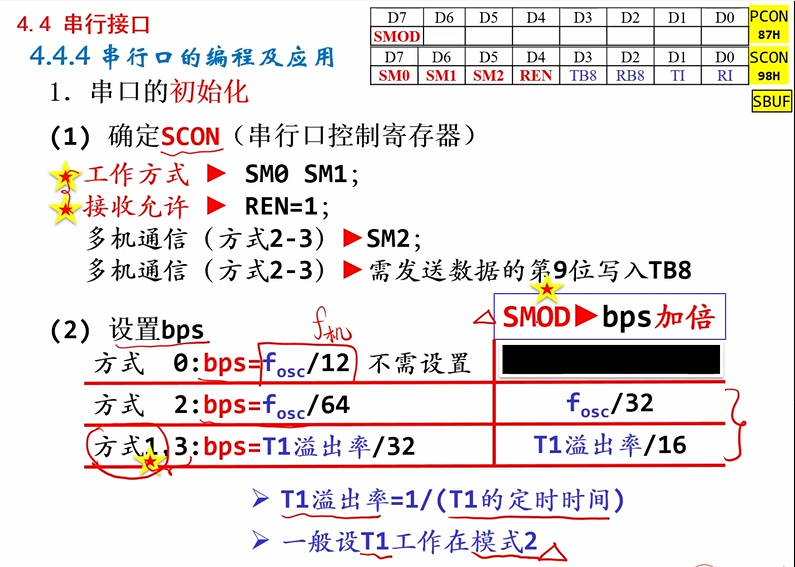
工作方式,波特率
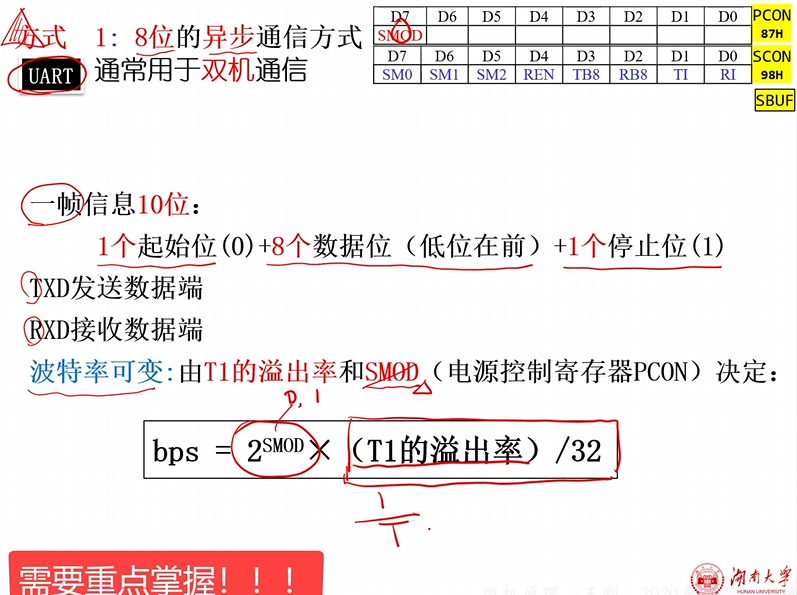
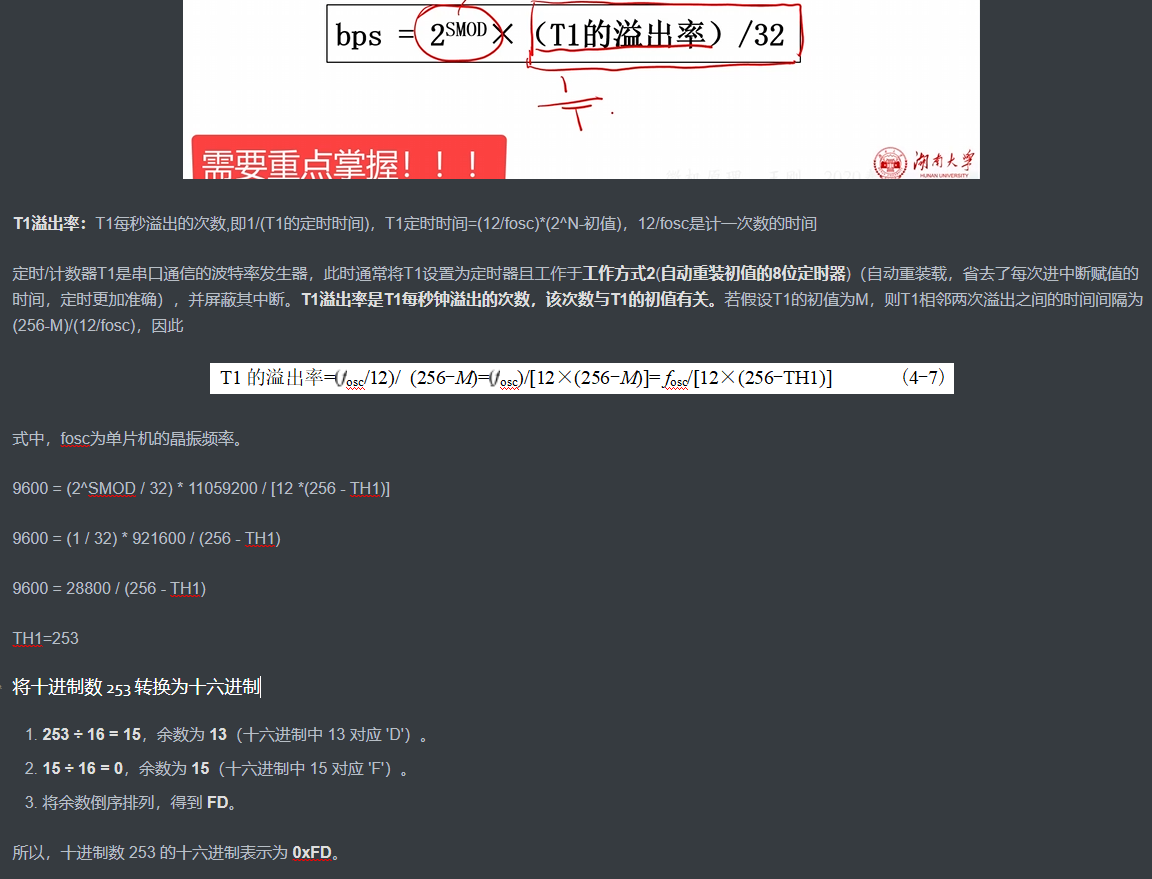
T1溢出率:T1每秒溢出的次数,即1/(T1的定时时间),T1定时时间=(12/fosc)*(2^N-初值),12/fosc是计一次数的时间
定时/计数器T1是串口通信的波特率发生器,此时通常将T1设置为定时器且工作于工作方式2(自动重装初值的8位定时器)(自动重装载,省去了每次进中断赋值的时间,定时更加准确),并屏蔽其中断。T1溢出率是T1每秒钟溢出的次数,该次数与T1的初值有关。若假设T1的初值为M,则T1相邻两次溢出之间的时间间隔为(256-M)/(12/fosc),因此

式中,fosc为单片机的晶振频率。
9600 = (2^SMOD / 32) * 11059200 / [12 *(256 - TH1)]
9600 = (1 / 32) * 921600 / (256 - TH1)
9600 = 28800 / (256 - TH1)
TH1=253
将十进制数 253 转换为十六进制
- 253 ÷ 16 = 15,余数为 13(十六进制中 13 对应 ‘D’)。
- 15 ÷ 16 = 0,余数为 15(十六进制中 15 对应 ‘F’)。
- 将余数倒序排列,得到 FD。
所以,十进制数 253 的十六进制表示为 0xFD。
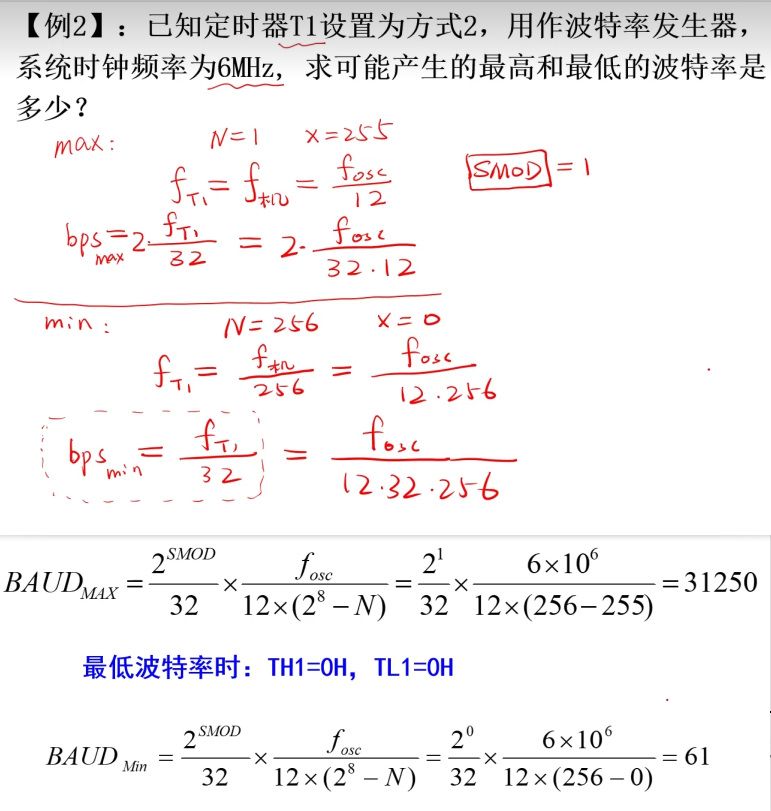
最高波特率就是要让定时计数器溢出的尽可能快,技术次数N=1,初值为255
最低波特率就是要让定时计数器溢出的尽可能慢,计数次数N=256,初值为0
有误差是因为晶振是12MHZ,当晶振是11.0592MHZ时误差才为0,此时波特率越大误差越大
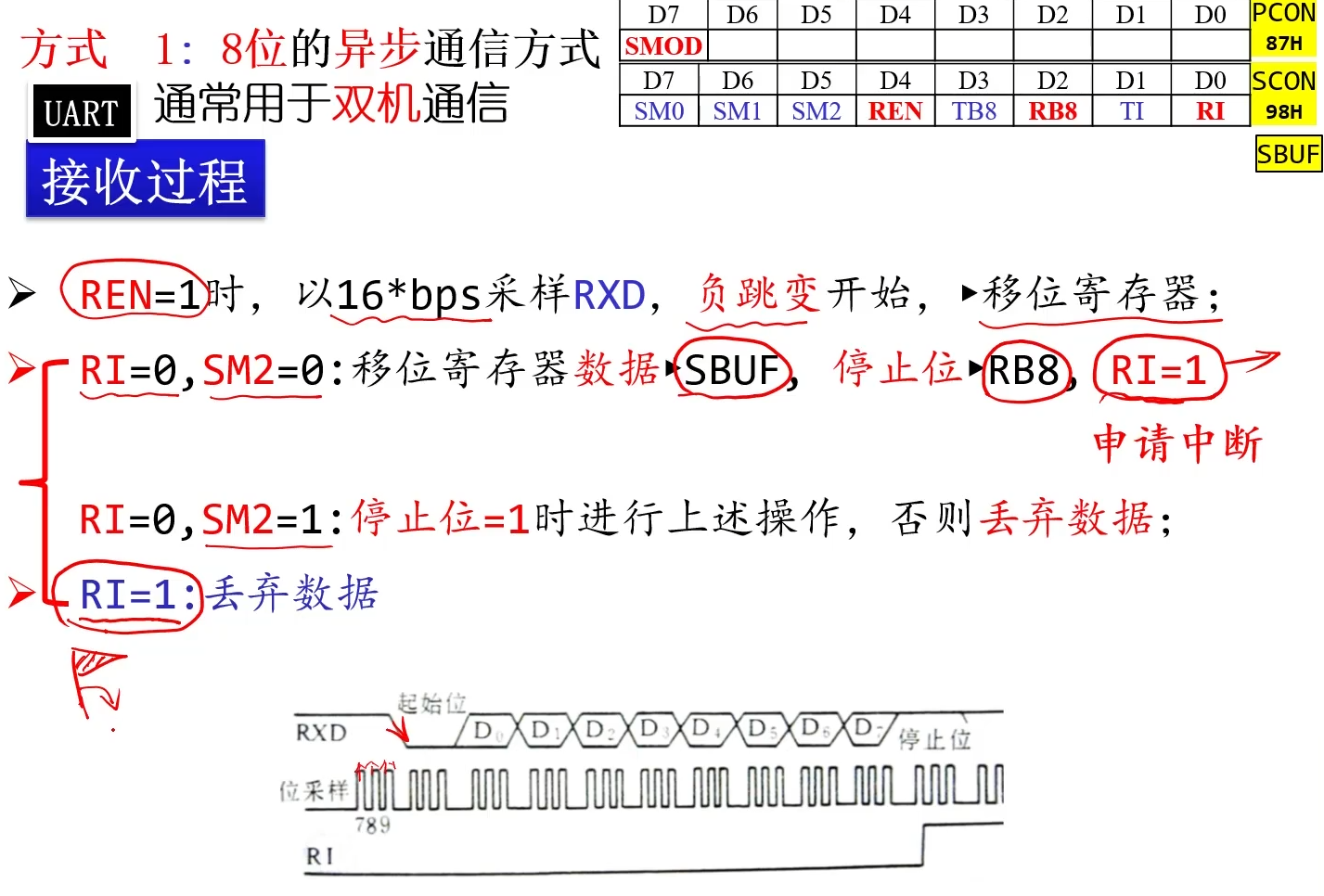
RI=1丢弃数据是因为此时接收SBUF已经满了但是还没有传递到总线上,如果此时继续写入数据则会破坏原来收好的一包。

编程
1.初始化:
N即定时器计数次数,最大计数-N即T1初值
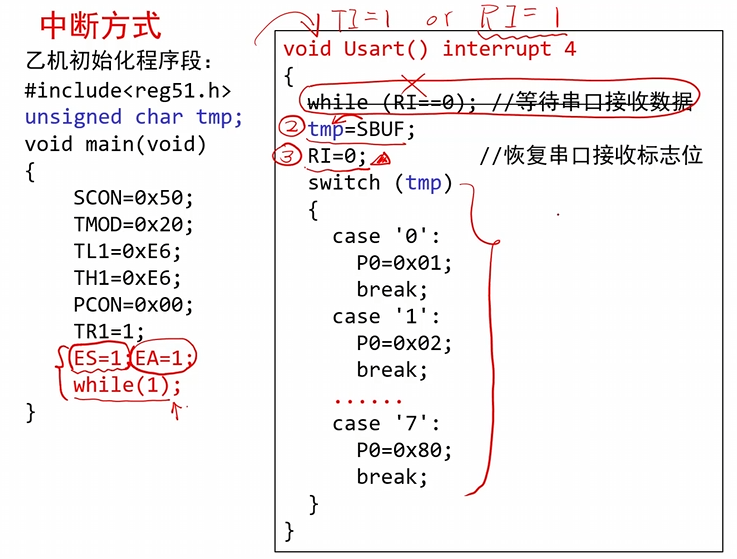
乙机可用始终查询或者中断的方式接收
实验:串口助手发给单片机,单片机再传回串口助手
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
| #include "uart.h"
#include <REGX52.H>
void UART_Init(unsigned char ival)
{
SCON=0x50;
PCON=0x70;
TMOD&=0x0F;
TMOD|=0x20;
TH1=ival;
TL1=ival;
ET1=0;
ES=1;
EA=1;
TR1=1;
}
void UART_SendByte(unsigned char Byte)
{
SBUF=Byte;
while(!TI);
TI=0;
}
void UART_SendString(unsigned char *str)
{
while(*str !='\0' )
{
UART_SendByte(*str);
str++;
}
}
void uart() interrupt 4
{
unsigned rec_data=0;
if(RI==1)
{
RI=0;
rec_data=SBUF;
UART_SendByte(rec_data);
}
}
|
单片机系统的并行扩展
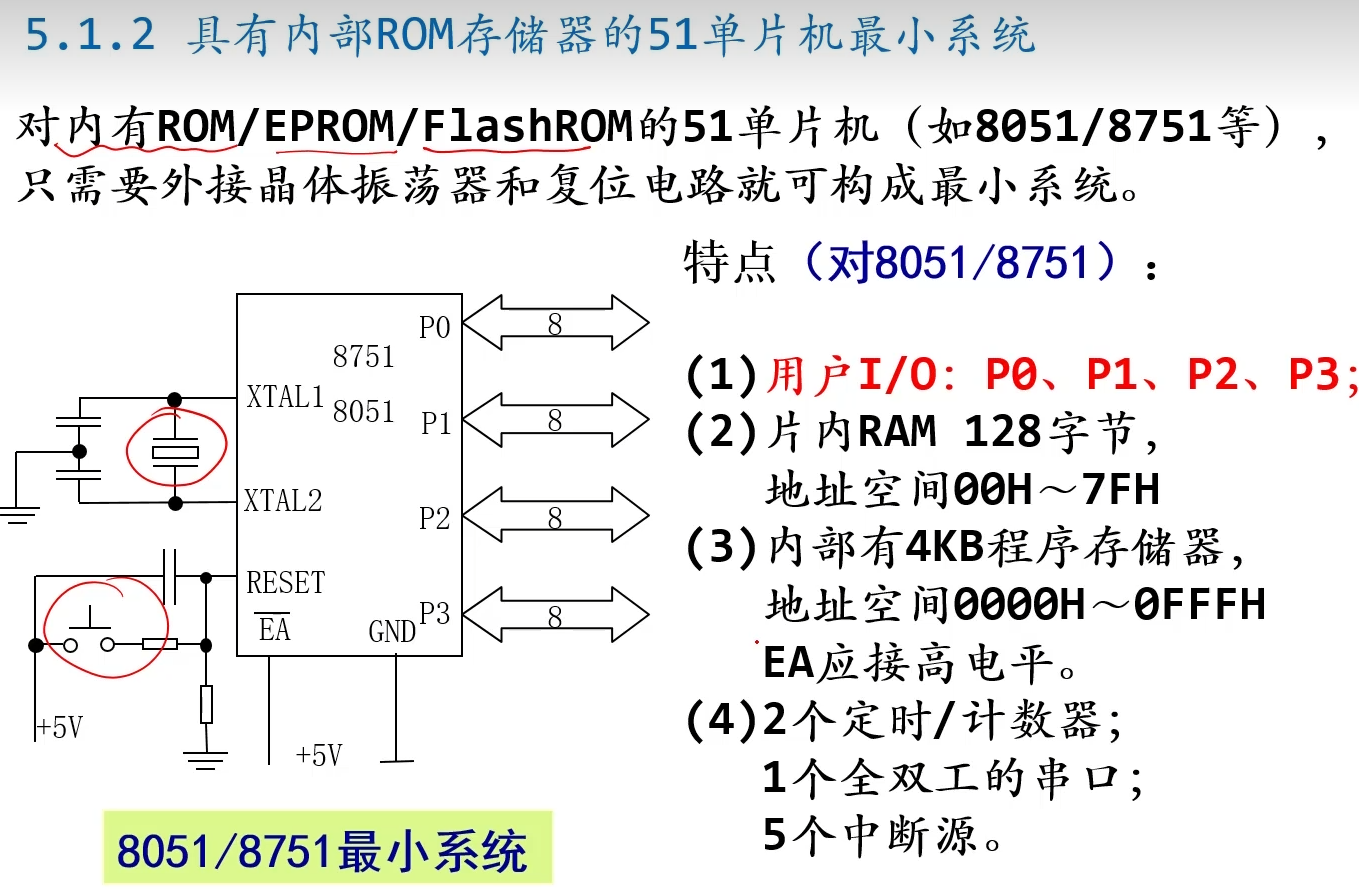
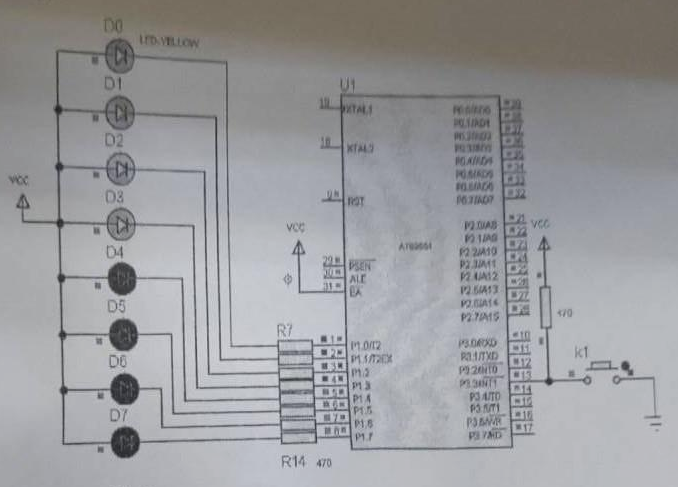
51单片机最小系统

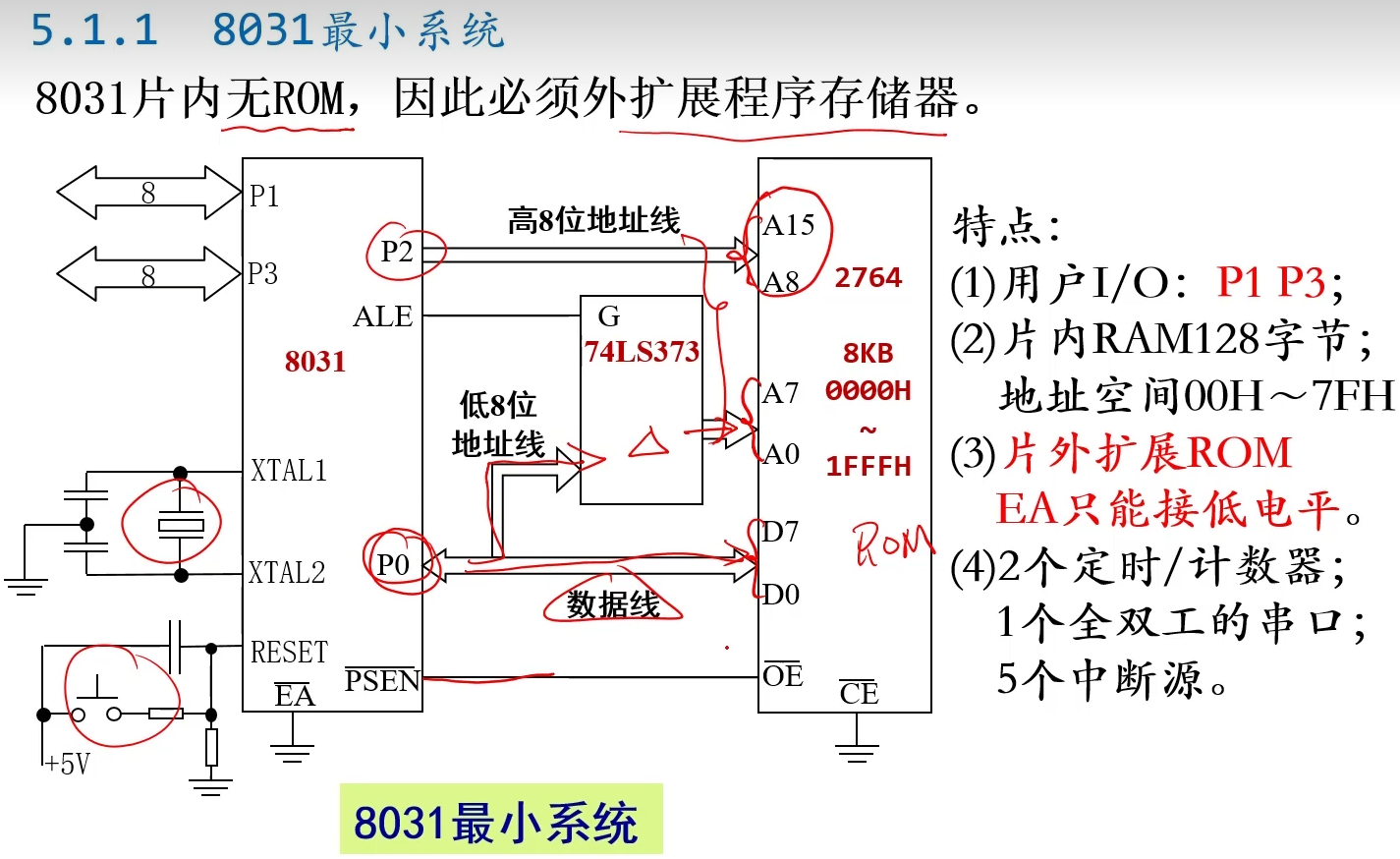
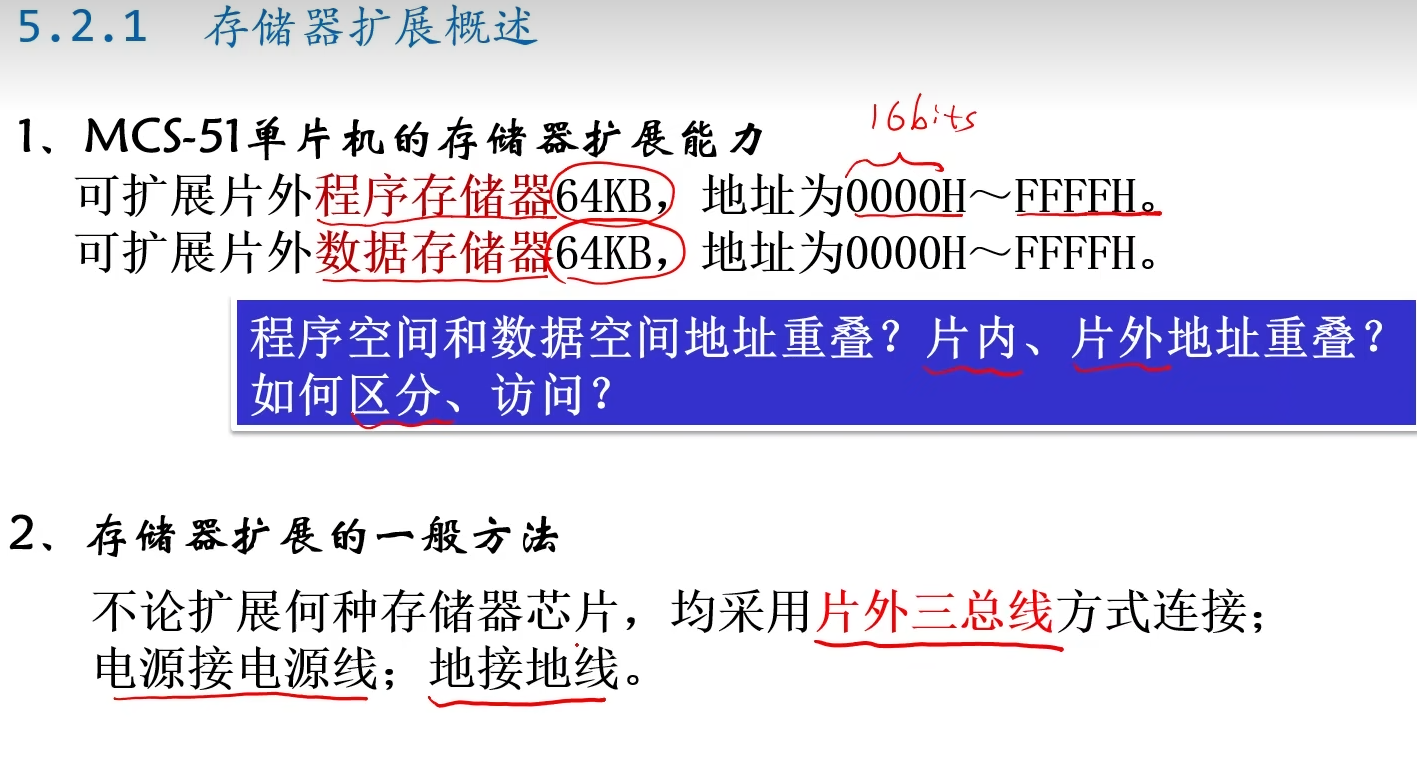
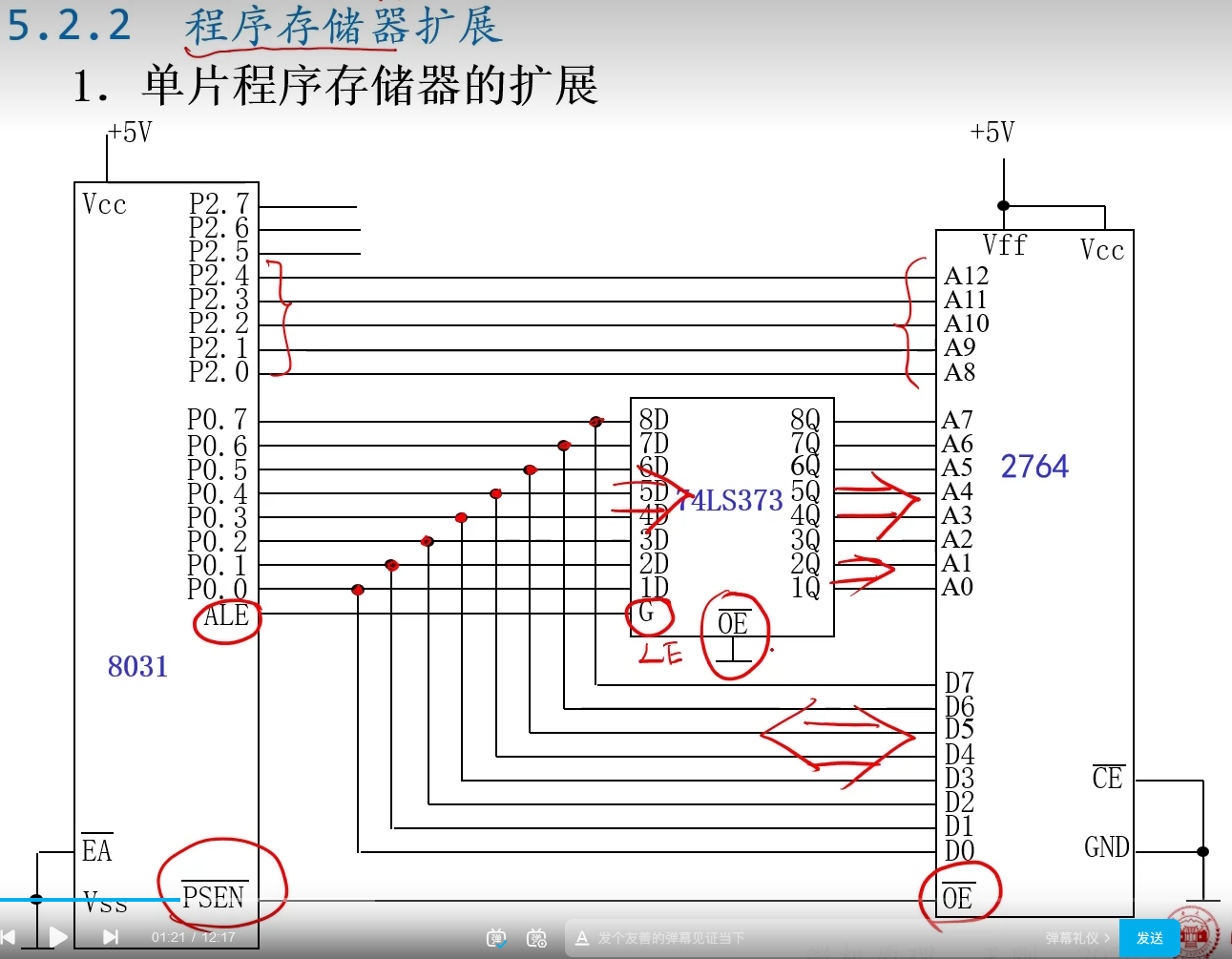
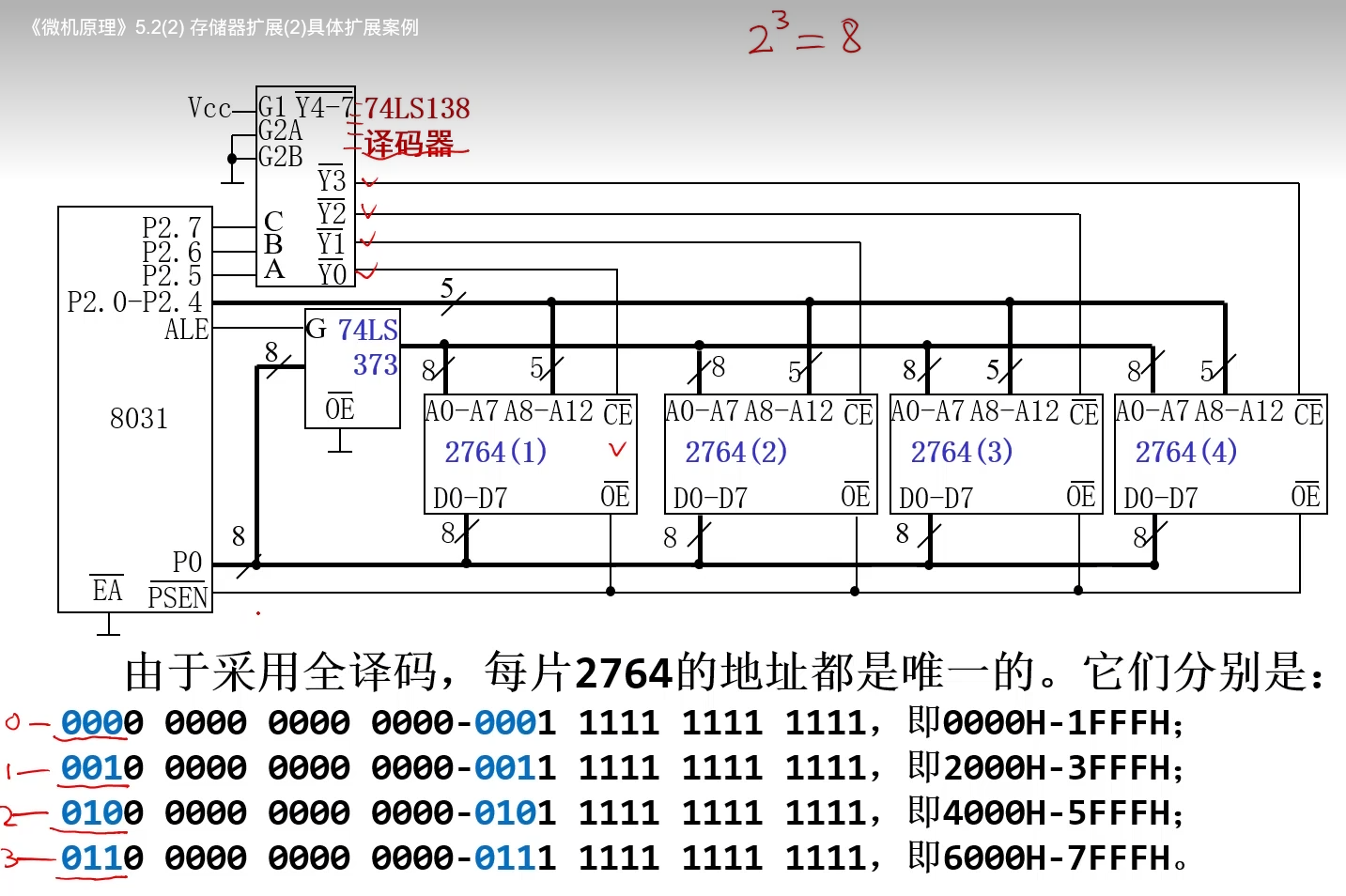
存储器扩展
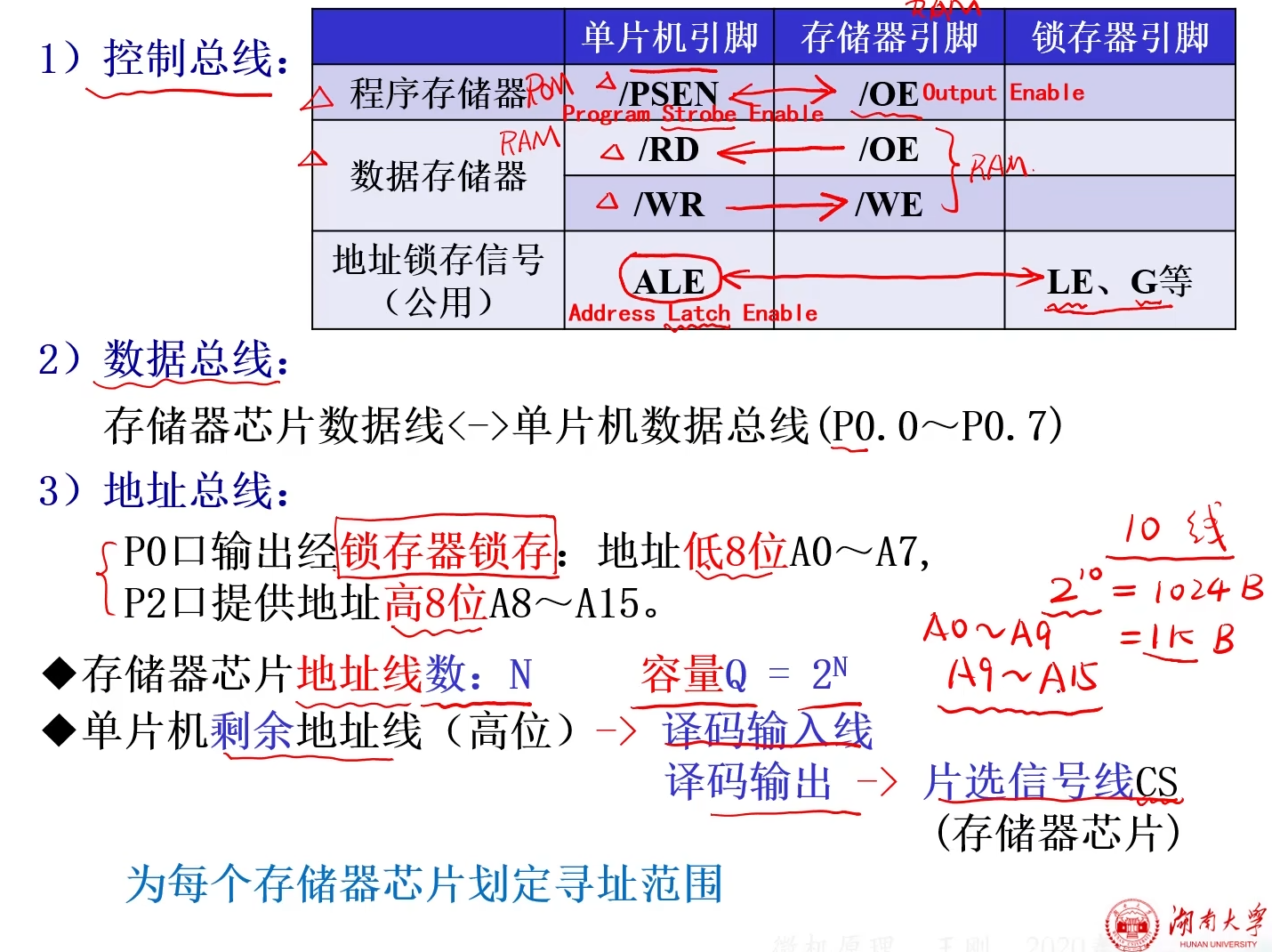
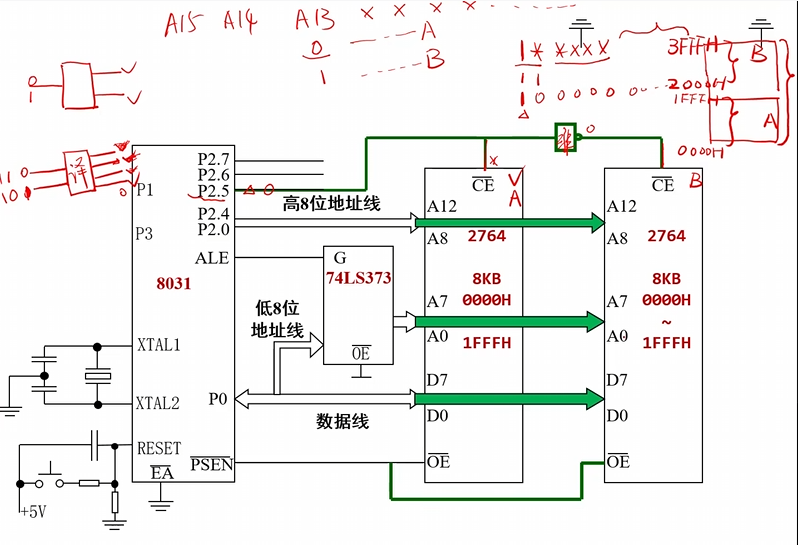
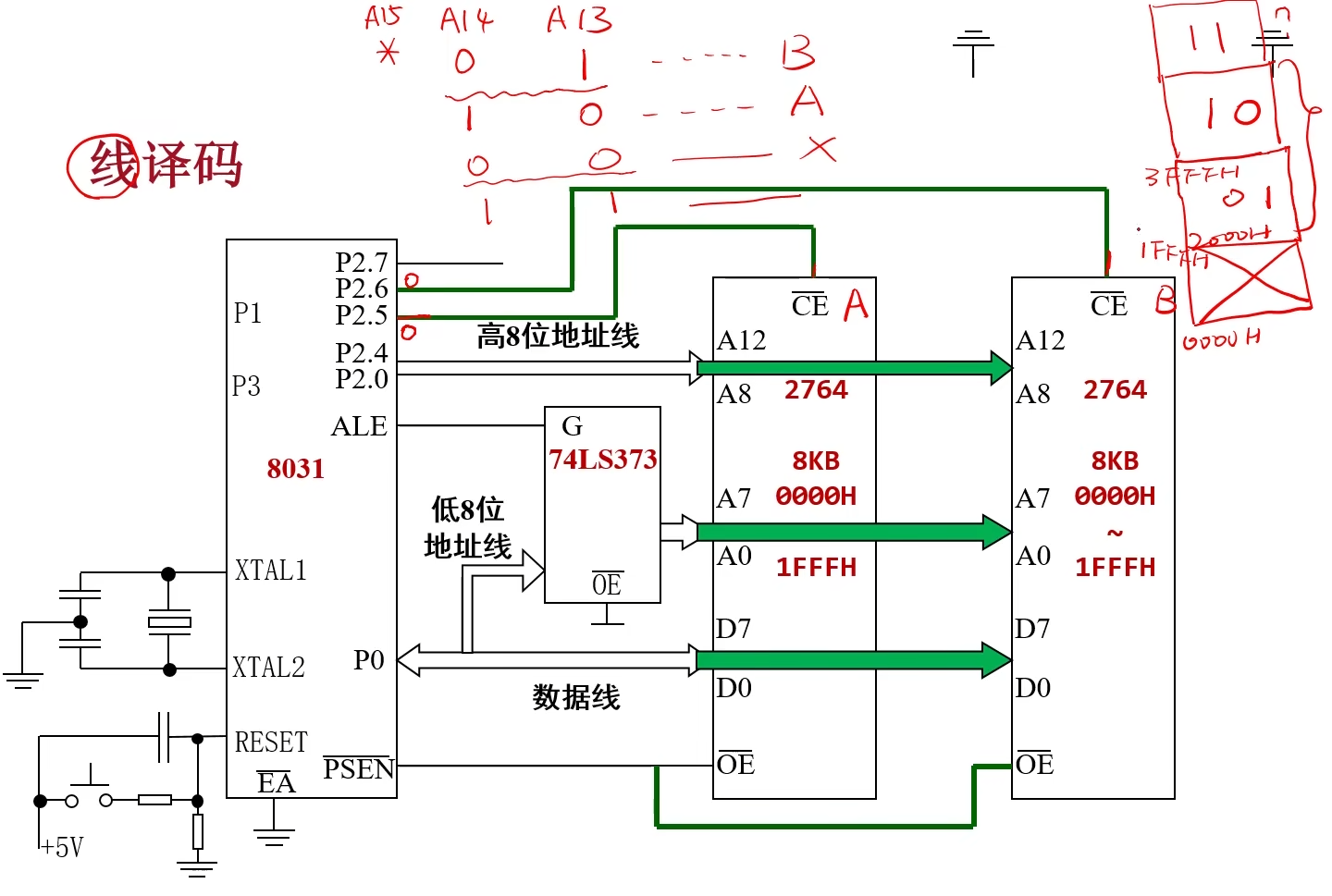
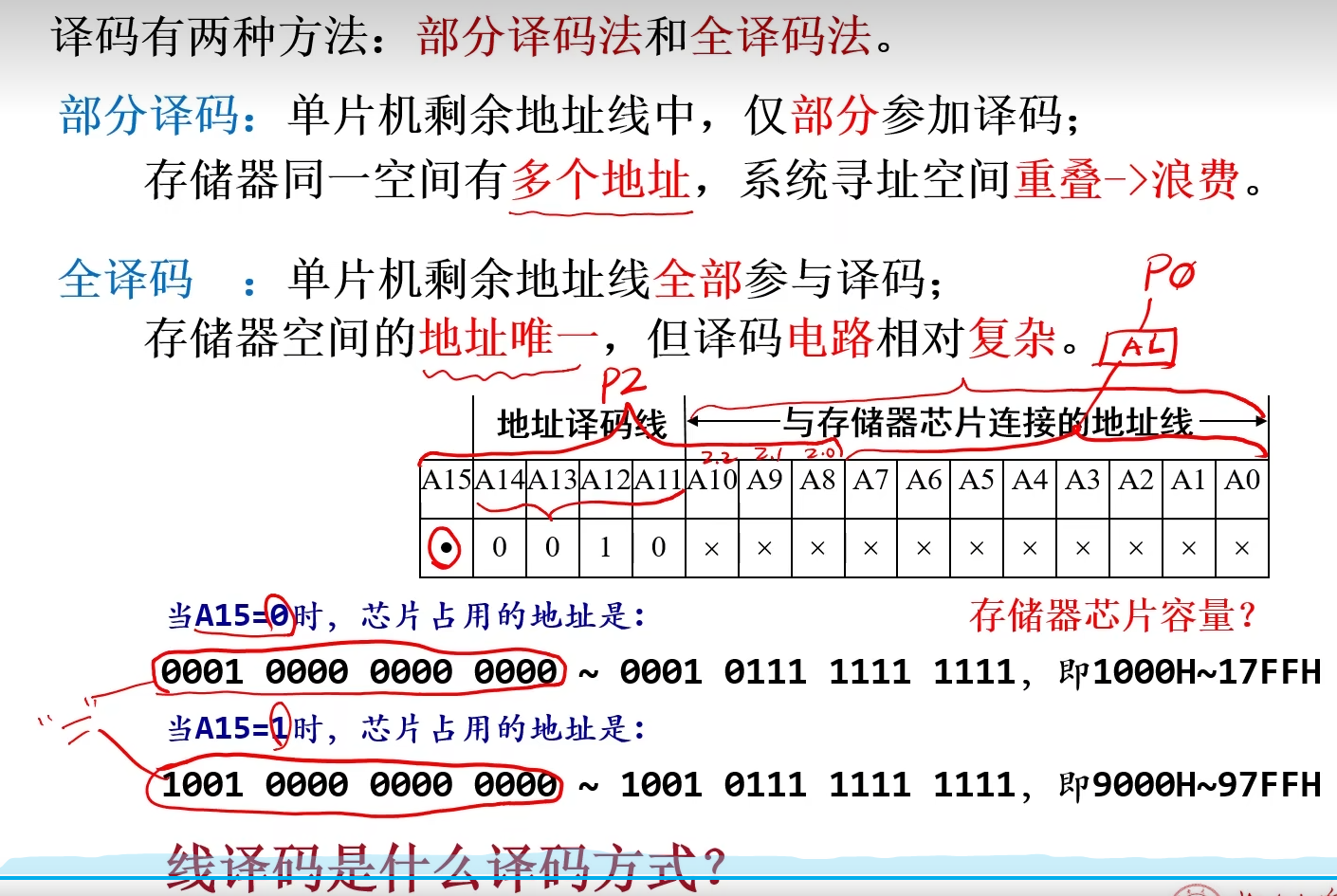
程序存储器扩展
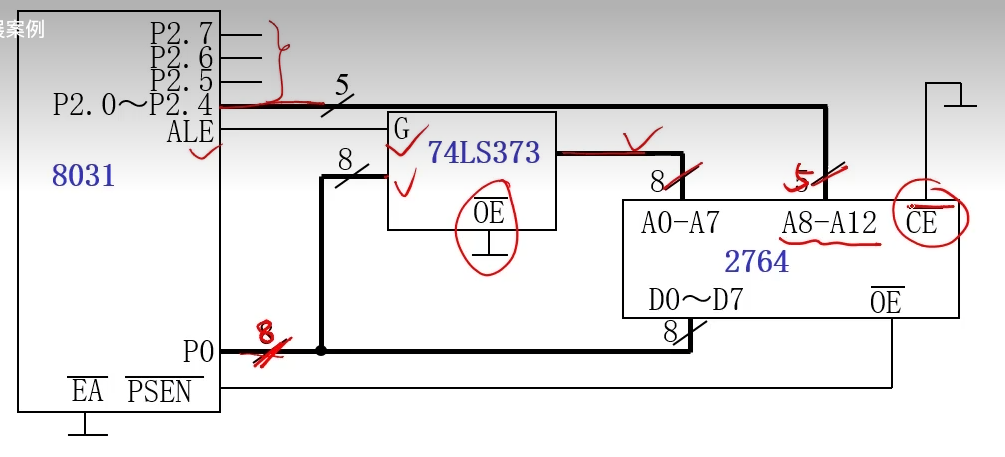
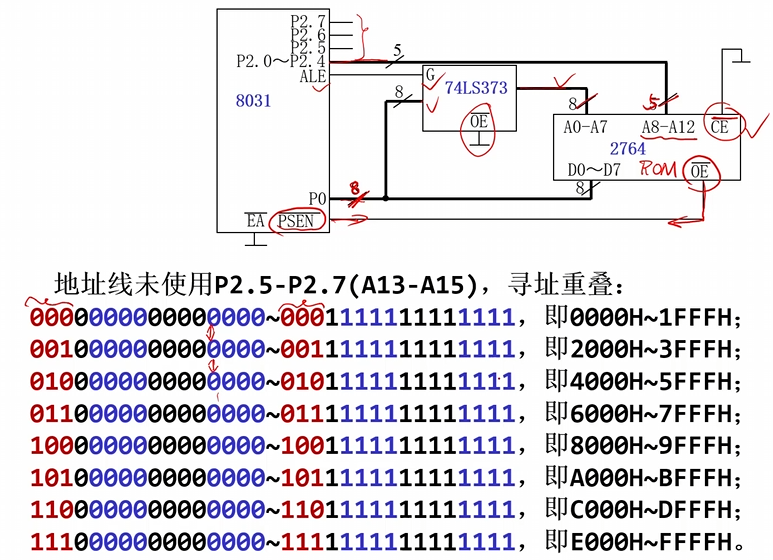
简化画法:
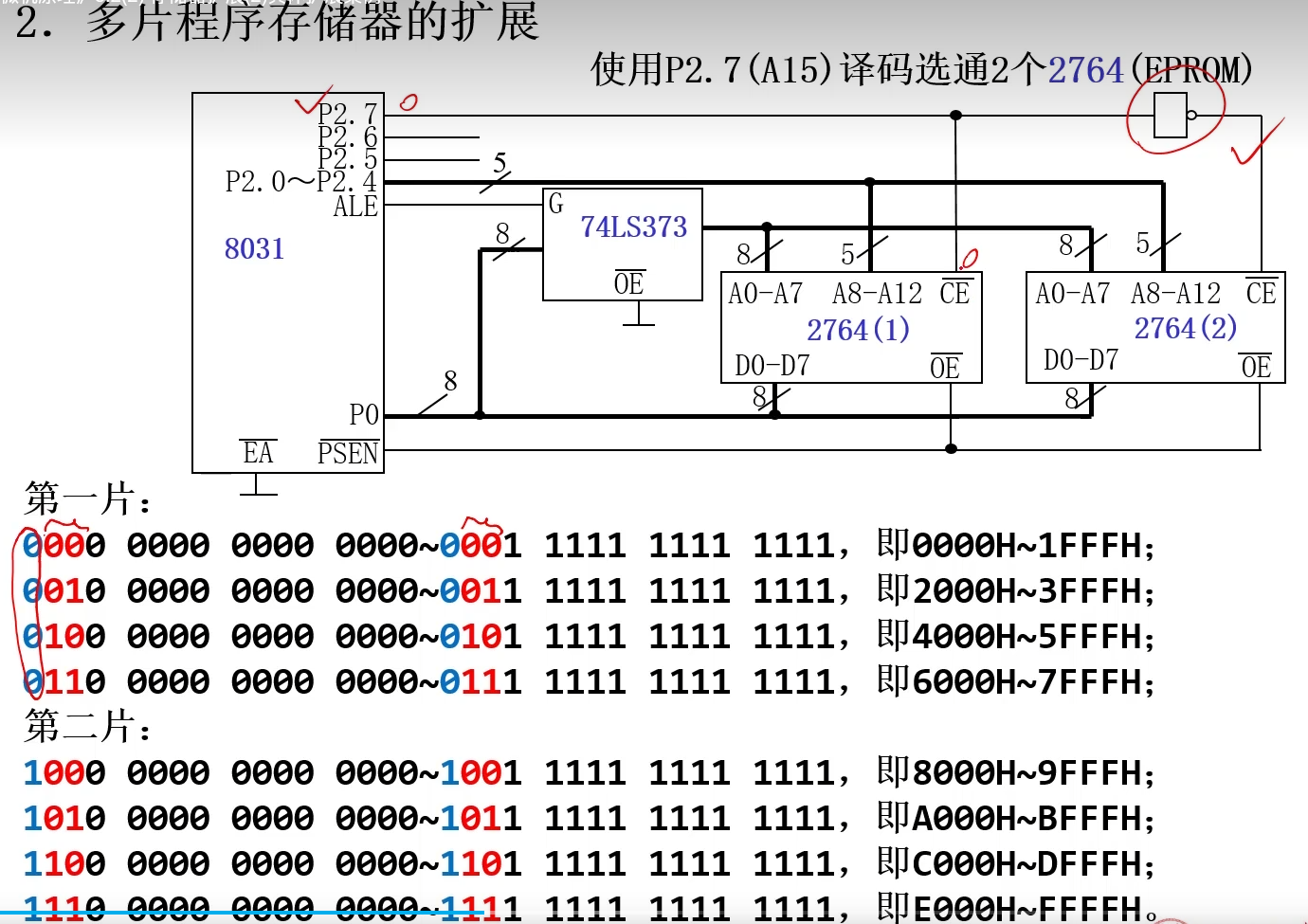
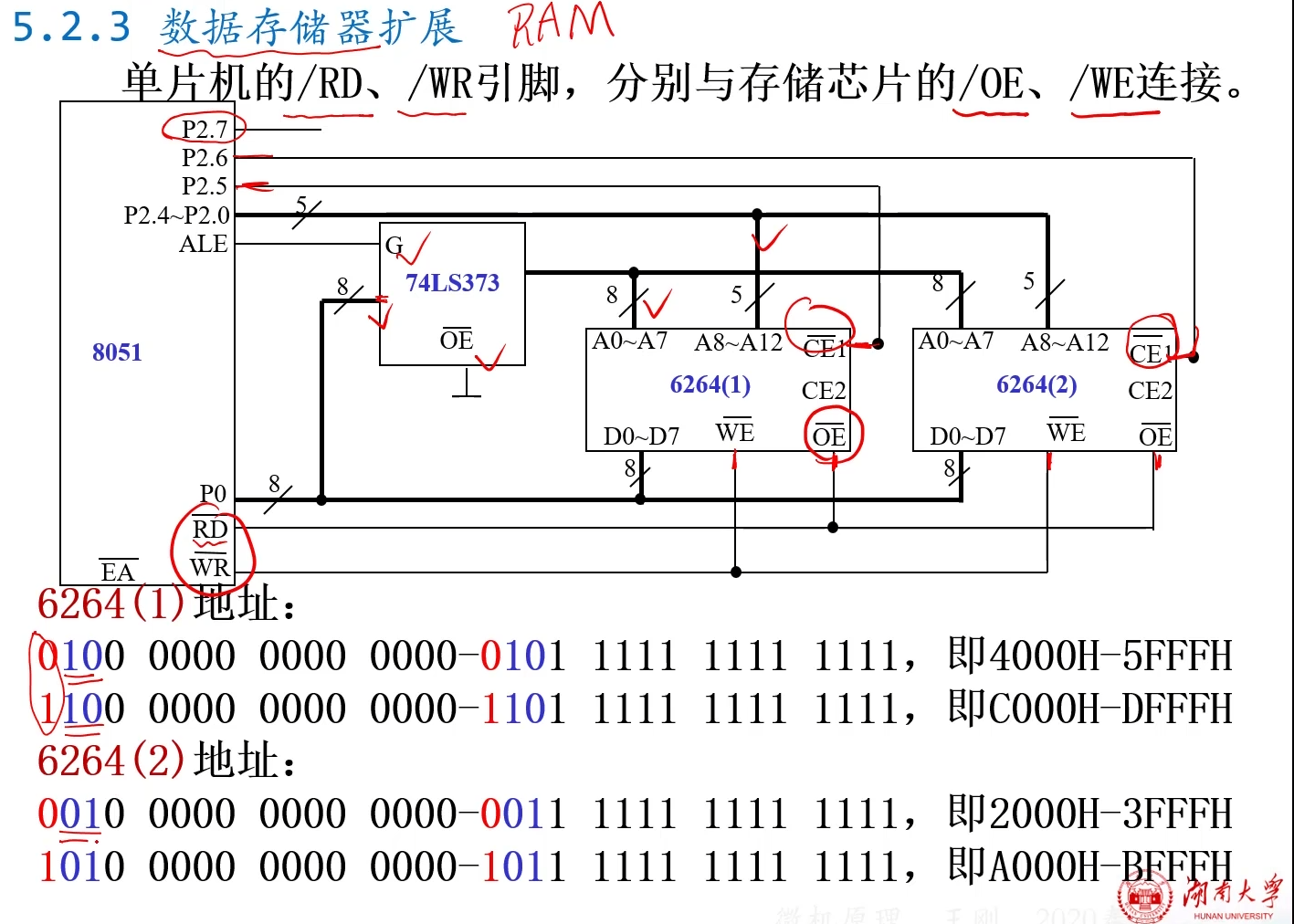
数据存储器扩展
2024期末题
1.外部中断
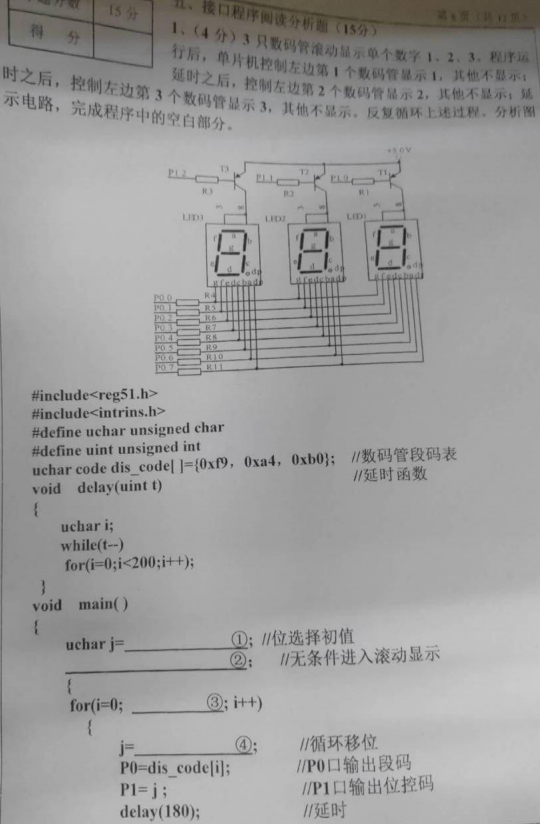
如下图所示,在单片机P1口上接有8只LED,全灭。在外部中断1输入引脚(P3.3)接一只按钮开关K1,每按一次按钮开关K1,使外部中断1引脚接地,产生一个低电平触发的外部中断请求。在中断服务程序中,使低4位的LED保持灭,高4位的LED亮,如此交替闪烁10次。然后从中断程序返回,控制8只LED全亮。请补充完整下列程序的主函数main()和终端服务程序int1()。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| #include <reg51.h>
#define uchar unsigned char
#define K1 P3_3
void Delay(unsigned int i)
{
unsigned int j;
for(;i>0;i--)
for(j=0;j<333;j++)
{;}
}
void main()
{
EA=1;
EX1=1;
IT1=0;
while(1)
{
P1=0x00;
}
}
void int1() interrupt 2
{
uchar m;
EX1=0;
for(m=0;m<10;m++)
{
P1=0x0f;
Delay(500);
P1=0xf0;
Delay(500);
}
EX1=1;
}
|
注意点:
1.LED是低电平点亮
2.外部中断1:中断号为2 低电平触发:IT1=0;
3.进入中断程序后EX1=0;是为了关闭外部中断1,此时再按按键没用,直到中断函数中执行完毕后,再令EX1=1;
4.若头文件为REGX52.H,可以用P3_3,在头文件已经定义了P3_3,若为reg52.h,头文件只定义了P3,操控第三位的话是P3^3, 可令sbit key=P3^3;
INT1的IT1决定外部中断1是下降沿触发还是低电平触发(外部中断1输入引脚接的是按键,当按键按下,引脚接地,低电平触发外部中断,进入中断服务程序),IE1是中断标志位(当中断源到来时由单片机自动置1),EX1,为外部中断1控制开关,EA为全局总中断控制开关,IP是用来设置中断优先级,默认是0,不用管。
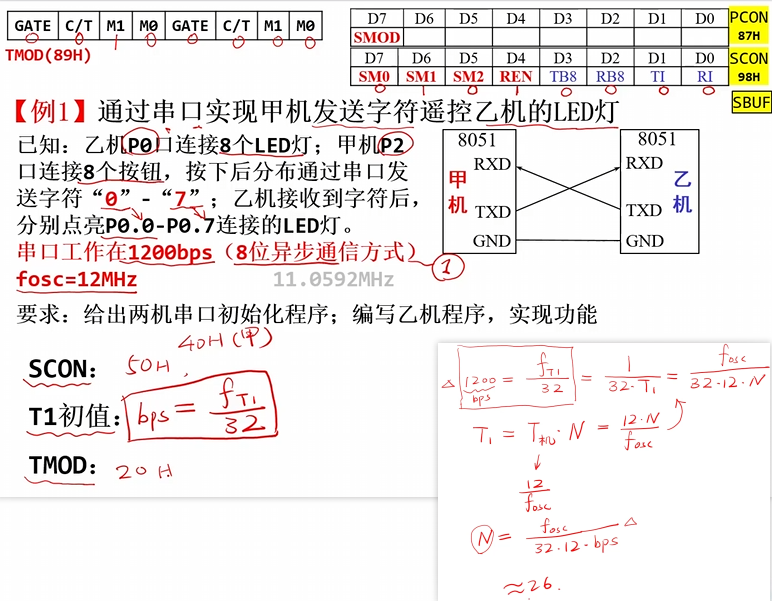
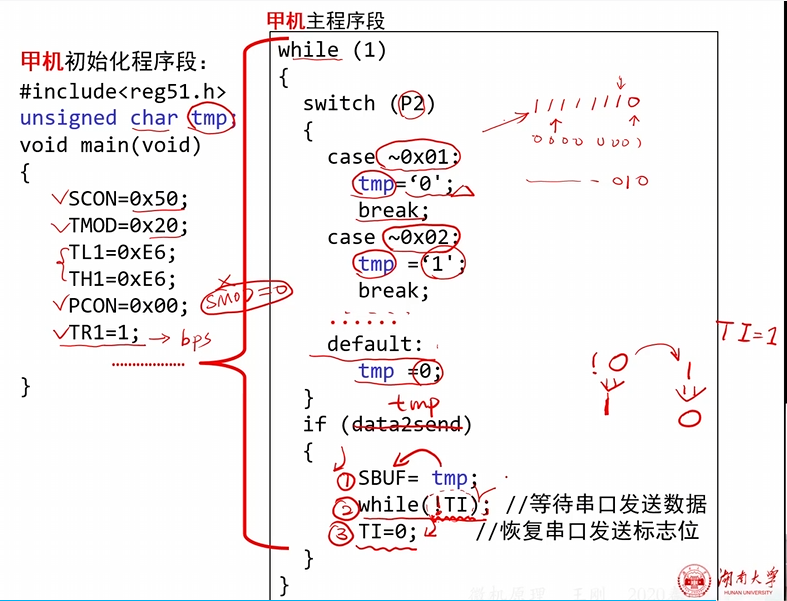
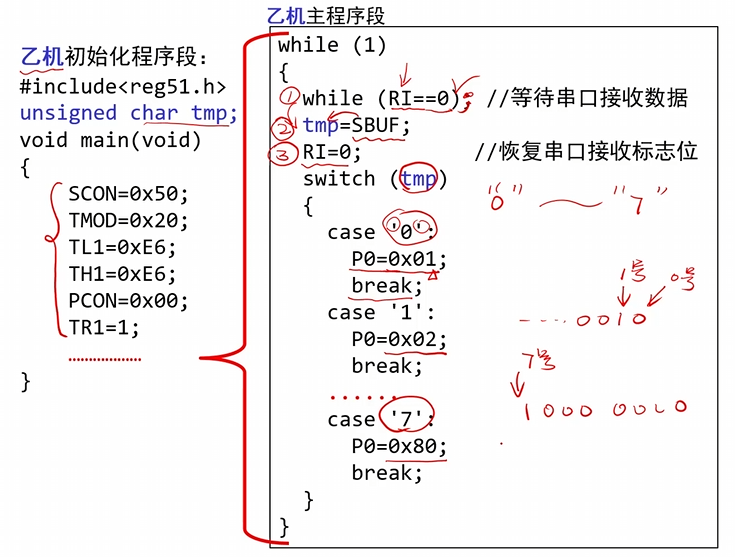
2.串口双机通信
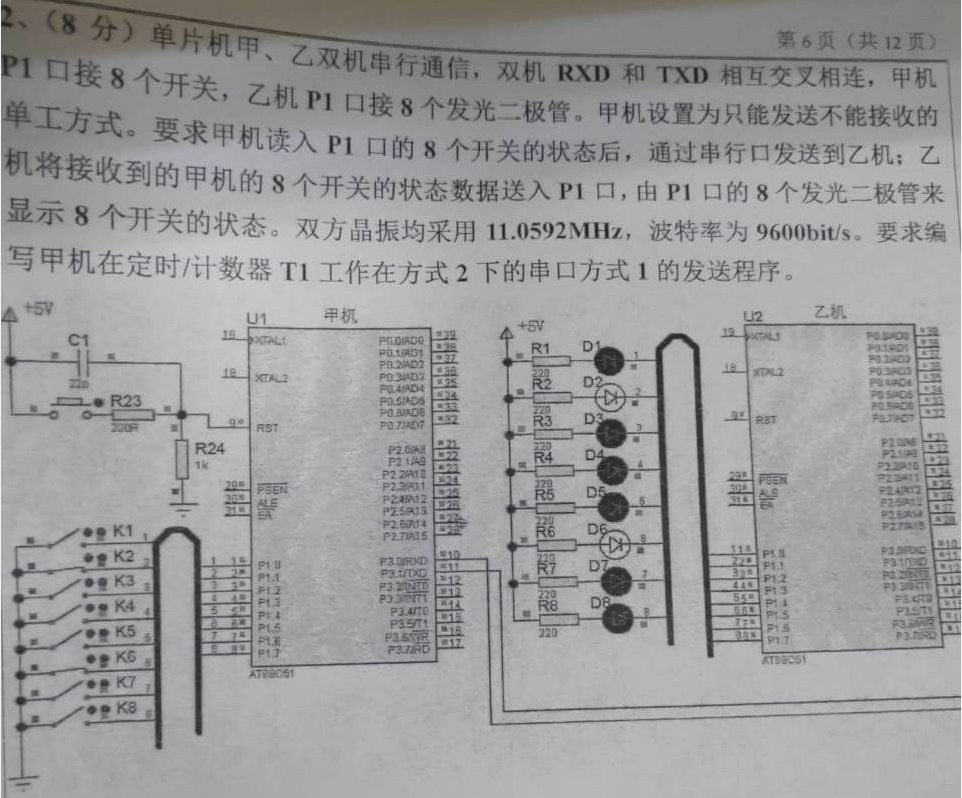
题目分析:
1.编写甲机在定时/计数器T1工作在方式2下的串口方式1的发送程序,晶振位11.0592MHZ,波特率为9600bit/s
2.甲机只能发送,不能接收
定时器工作方式2:自动重装载(初值),用于串口波特率
将TL1,TH1赋为相同的初值,当TL1溢出后自动将TH1的值赋值给TL1
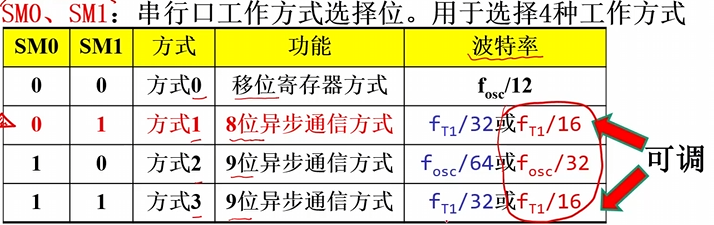
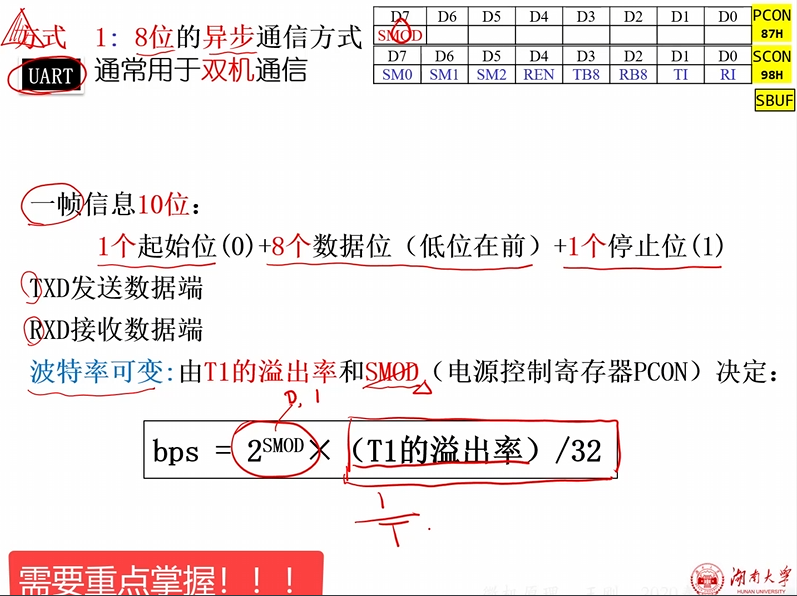
串口工作方式1:8位的异步通信方式,通常用于双机通信
波特率计算
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| #include <REGX52.H>
unsigned char temp=0;
void main()
{
SCON=0x40;
PCON=0x00;
TMOD&=0x0F;
TMOD|=0x20;
TH1=0xfd;
TL1=0xfd;
ET1=0;
ES=1;
EA=1;
TR1=1;
while(1)
{
temp=P3;
SBUF=temp;
while(!TI);
TI=0;
Delay_ms(500);
}
}
|
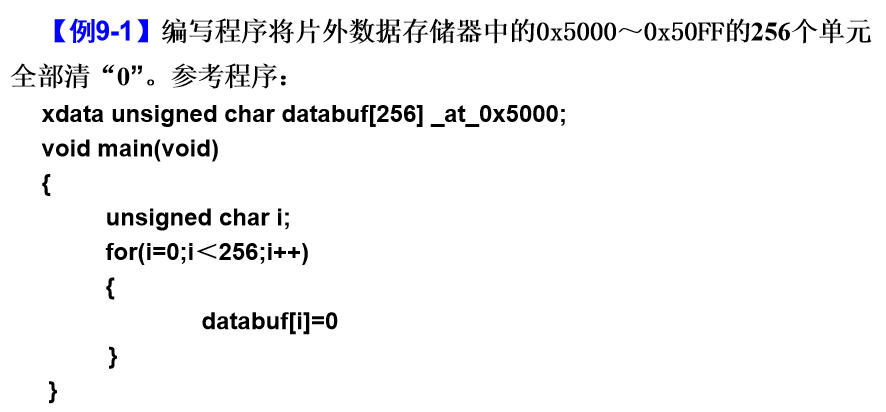
3.写数据到片内片外RAM
编写C51程序,记录函数(x+1)^2的值(x=0到19),将函数值存入片内RAM的30H为首地址的连续单元中,再将个位数不为6的函数值读入到片外RAM以1000H为首地址的连续单元中,并在屏幕上显示个位数不为6的函数值的个数。
答案:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| #include "reg51.h"
xdata unsigned int buffer[20]_at_0x1000H;
data unsigned int buf[20]_at_0x30H;
void main()
{
unsigned char i,j;
for(i=0;i<20;i++)
{
buf=(i+1)*(i+1);
if(buf[i]%10!=6)
{
buffer[j++]=buf[i];
}
}
printf("j",%d);
}
|
PS:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| xdata unsigned char databuf[256] _at_0x5000;
|
4.动态数码管
1
2
3
4
5
| 答案:
0x01;
while(1);
i<3;
(_crol_(j,1))&0x07
|
在c语言中,尤其是单片机的C51中,移位运算操作很常见。实现移位操作的方法有两种:一是利用移位运算符,二是利用移位函数。
区别:
1.移位运算符,是系统内置的运算操作,编译编译不用包含相关头文件;而移位函数编译要包含intrins.h头文件。
2.<<和>>的移位规则数据从一端移动到另外一端,数据尾部移走后会补0,数据头部移到最前端后会溢出,溢出的数据就被抹掉了。
_crol_等函数是是循环移位,首位相接,数据前端移动到尾部后,会从尾部再次进入队列,数据不会溢出。运算符是线性队列,循环移位函数是环形队列。
1
2
3
4
| unsigned char _crol_ (
unsigned char c,
unsigned char b);
|
此题我觉得有点问题,一方面是它段码表{0xf9,0xa4,0xb0}一般共阳极来说确实表示的是1,2,3,但是带到图中却表示的并不是1,2,3,不过这个不影响做题
第二方面是他说的左边第一个,左边第二个,左边第三个,是不是从左起的意思,这样的话文档里的答案是有问题的它是0x01,也就是从最右边第一个开始,依次向左。

 wechat
wechat alipay
alipay